
Walk or take the bus? Modeling mode choice with dynamic transit assignment.
How do we decide whether to walk somewhere or take the bus and how do you model that decision in Aimsun Next?

Before you start to code your model, you can set up roundabout road types to minimize local calibration. As vehicles travel around roundabouts at speeds significantly lower than the speed limit, you can use separate road types for roundabouts of different radii to set accurate speeds.
Figure 1: Road types within the project window

Figure 2: Use a polyline to measure the size of the roundabout island
Once the road type is applied to the roundabout, the parameters for all roundabout sections as well as circulating and exiting turns based will by default be set to those in the road type.
Figure 3: The road type of this roundabout is set to roundabout 40-60m
If the model is in a country with a “choose-lane-on-entry” style roundabout (see part 1), the distance-zone parameters should be at least the circumference of the roundabout; this means that a vehicle entering the roundabout is aware of the exit lane on entry.
These parameters can be set within the road type for each roundabout road type: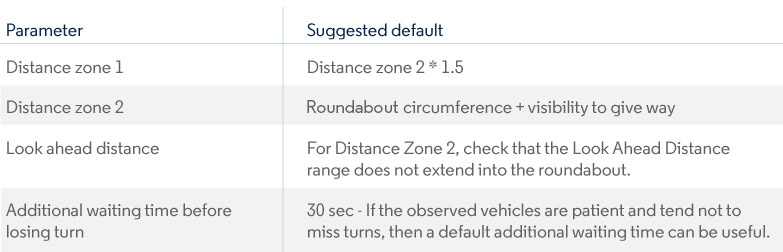

Figure 4: Calculating distance zones for a roundabout
Locally, you may also wish to adjust the visibility parameters. The visibility is set to the entry section to the roundabout and therefore can’t be adjusted through the use of a roundabout road type. You could also change these globally with a script or additional road type.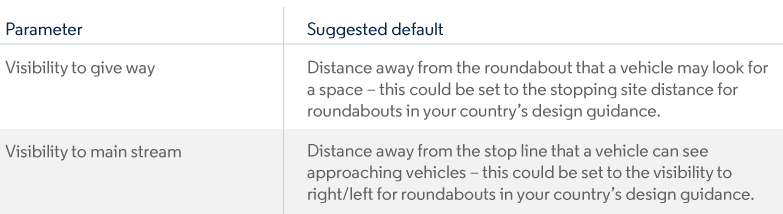

Figure 5: Visibility defaults can be set to design values
In congested situations in microsimulation, the distance zone parameters may need to be longer in order to minimize missed turns.
If you are coding a “choose-lane-on-entry-type” it can also be useful to increase the co-operation and aggressiveness of the section to encourage lane changing on the approach.
As there is no acceleration or deceleration in mesoscopic simulation, you may need to reduce the speed on approach and on the roundabout sections more than in micro; you can do this using an attribute override.
Figure 6: Attribute override for reducing speed on roundabouts at meso
As roundabouts have multiple turns, the turn counts cannot be obtained directly. There are two main ways of collecting roundabout turns:

Figure 7: Use extensive select to ensure that all the nodes within a roundabout are selected.
Figure 8: Right-click a node and select Create Supernode

Figure 9: Supernode is then generated with all possible turns within the junction
How do we decide whether to walk somewhere or take the bus and how do you model that decision in Aimsun Next?

How to apply a custom Route Choice function to emulate a heavy truck guidance system.

