
Connecting centroids to multiple sections
February 2023: Tessa Hayman explains different options for multiple centroid connections and the effects of different parameters and assignment algorithms.
Since version 8.2 of Aimsun, the Distribution and Modal Split steps have been separated into two different processes, each with their own Scenario and Experiment. Each of these two steps needs its own set of two types of function:
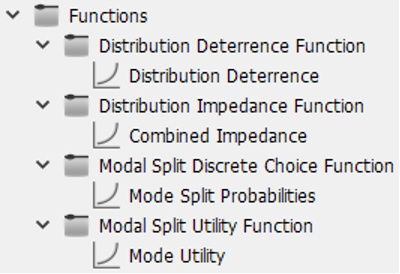
Figure 1 – Distribution functions and Modal Split functions
The Distribution process implements a gravity model, where you need to specify (a function to model) the resistance for making a trip between each particular OD pair, given the (combined skim costs or) impedance for that OD pair.
– Distribution Deterrence functions model the reluctance to make a trip given its impedance. You select the Deterrence function in the Distribution Experiment, so if you want to set up different discrete choice functions, such as per trip purpose, you will need to define a distribution scenario and experiment per purpose, changing the distribution deterrence function that you want to use each time.
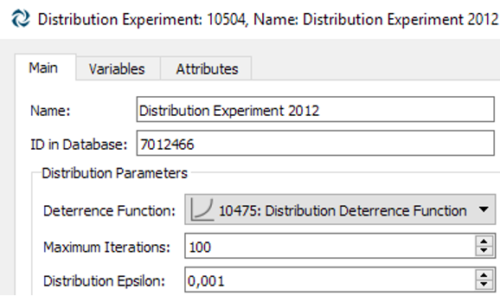
Figure 2 – Distribution experiment editor
An example of Distribution Deterrence function could be a Gamma function:

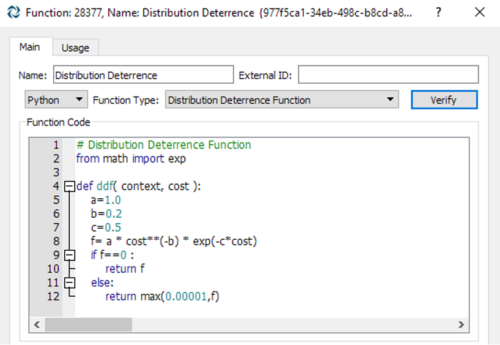
Figure 3 – Example of Distribution Deterrence function
– Distribution Impedance functions give the formula that combines the different available costs (distance, travel time, price, etc.) to take into account.
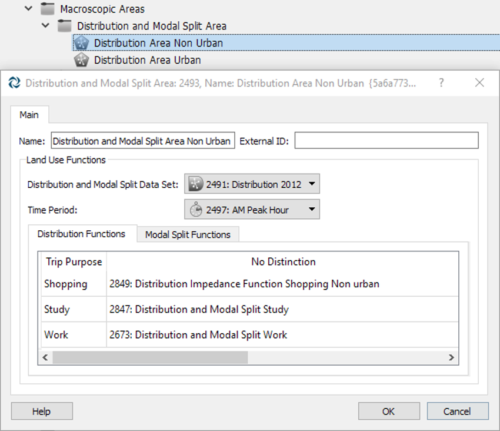
Figure 4 – Distribution Area editor
An example of Distribution Impedance function is a linear function that combines distance and travel time:

Figure 5 – Example of Distribution Impedance function
The Modal Split step calculates, for each OD pair, the probability of use for each transportation mode available, based on the utilities per transportation mode.
– Modal Split Discrete Choice functions calculate the probabilities within the available transportation modes. You select the Discrete Choice function in the Modal Split Experiment, so if you want to set up a different discrete choice function, e.g., per trip purpose, you will need to define a modal split scenario and experiment per purpose, changing the discrete choice function that you want to use each time.
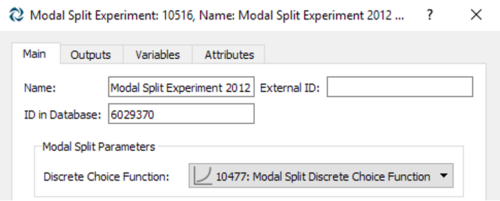
Figure 6 – Modal Split experiment editor
An example of a Discrete Choice function is the Multinomial Logit, where probabilities are calculated according to the utilities, following the formula:
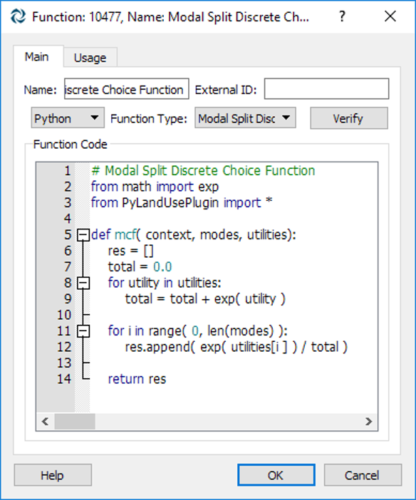
Figure 7 – Example of Modal Split Discrete Choice function
– Modal Split Utility functions represent the utility of each transportation mode according to the values of different variables, usually in linear form.
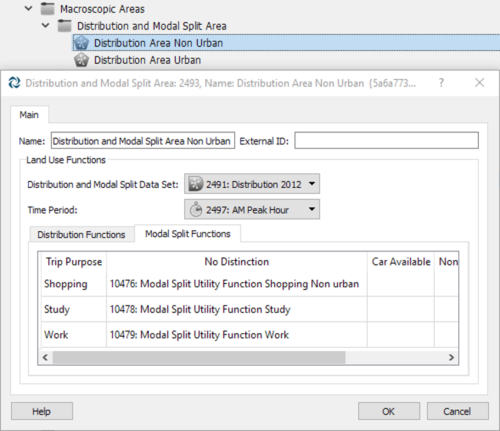
Figure 8 – Modal Split Area editor
Utility functions are usually linear functions depending on different cost variables (xi):

Figure 9 – Example of Modal Split Utility function
February 2023: Tessa Hayman explains different options for multiple centroid connections and the effects of different parameters and assignment algorithms.

January 2021: In Technical Note #53, we gave some tips on how to modify the cost for static assignment based on the vehicle type. In this month’s pro tip, Marga Delgado explains how to do it per trip purpose.

