Aimsun Next About Aimsun Next New Features
New features in Aimsun Next
Aimsun Next 24: Highlights
Released on April 16th, 2024, Aimsun Next 24 builds on our commitment to transportation network analysis and optimization. Many of the new features focus on productivity with a view to enhancing the building and running of large-scale, multi-modal models for cities, highways, and regions.
Here are some of the highlights:
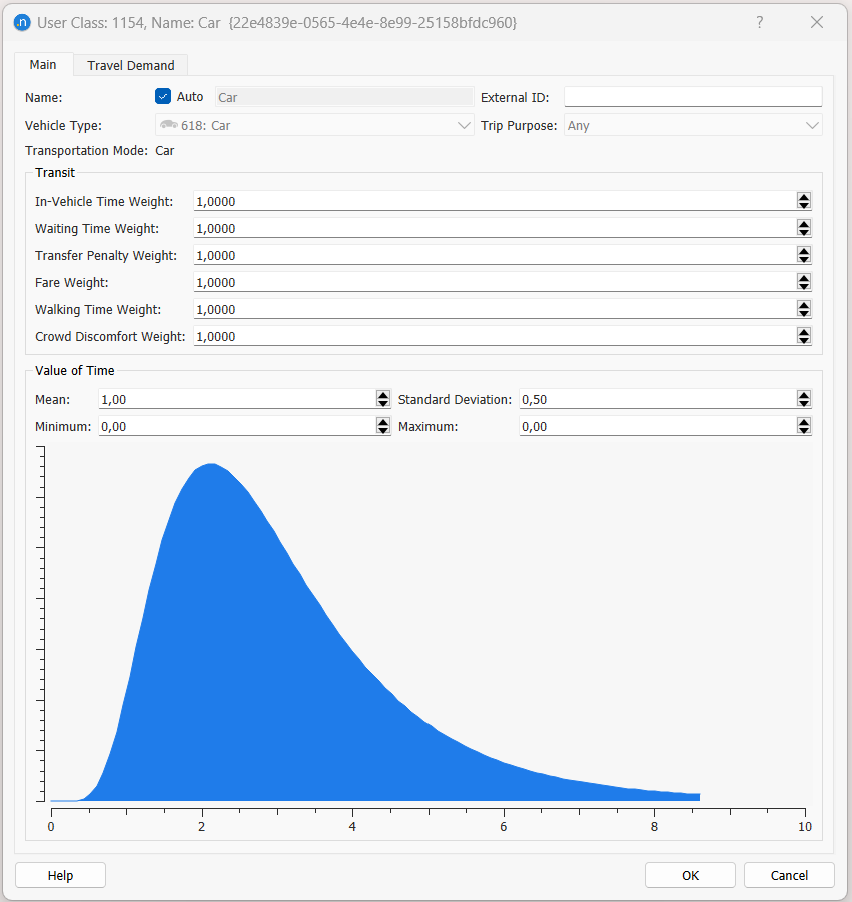
- To help you accurately estimate the traffic using toll roads, we’ve added the Bi-Criteria static assignment method to take into account a log-normal distribution for the Value of Time per user class.
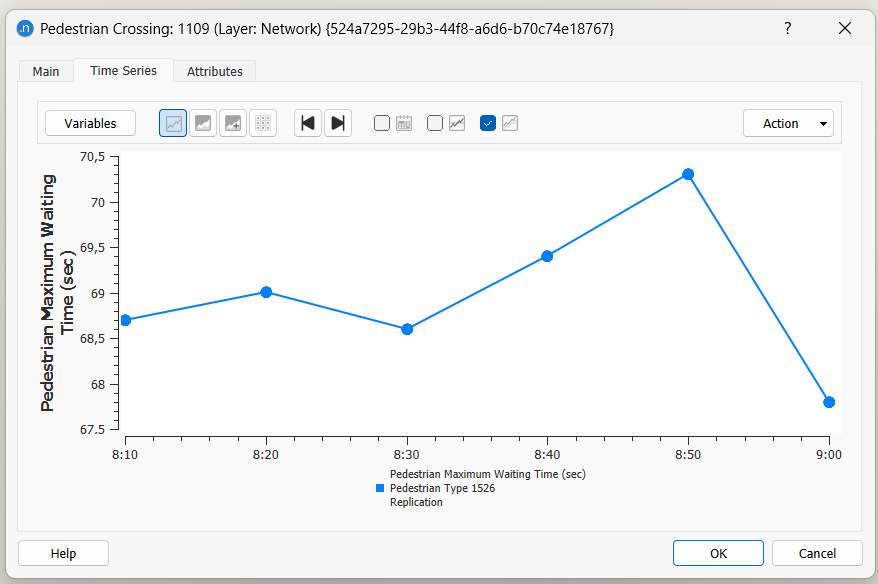
- We’ve added valuable statistics to analyze the benefit for pedestrians of a change in the signal timings or in the bus schedule.
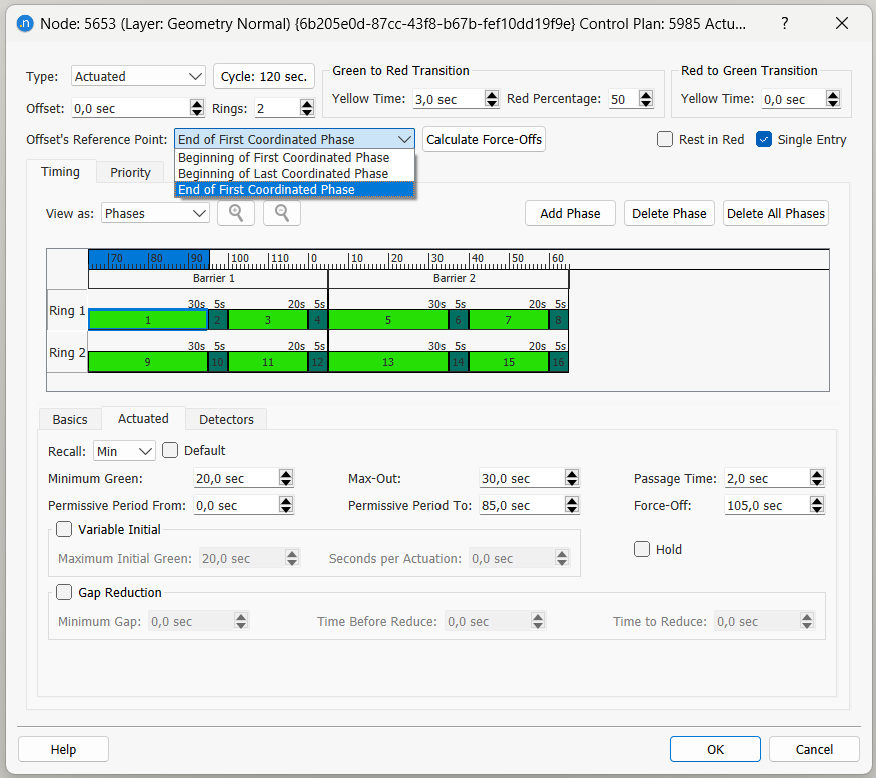
- Coordinated control plans with two rings distinguish 3 Offset’s Reference Points
- LISA controller server data directory is now defined as a Project Preference
- An Update AP Values button has been added to OCIT controllers
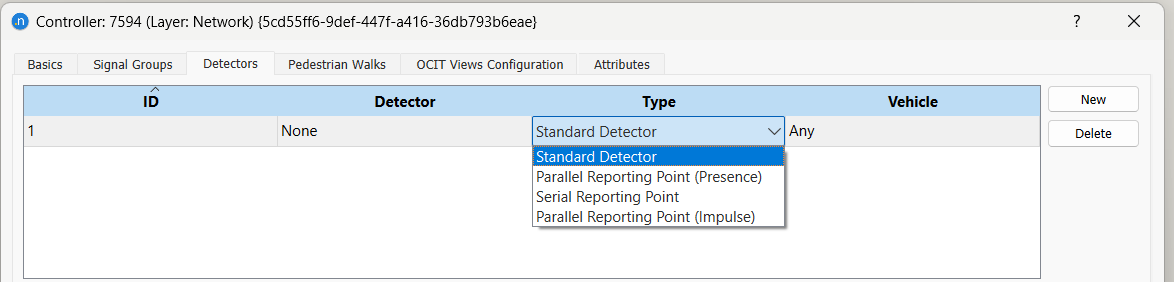
- Yutraffic controller now distinguishes between parallel reporting impulse and presence detectors
- Access travel time in public transit crowding discomfort function: you can now weight the discomfort of traveling on a crowded bus by the time you have to sit on-board.
Aimsun Next 24 also includes the following improvements that were released as Fast Track features in previous releases of Aimsun Next 23:
- A new option for Queue Jump Gridlock Prevention in the Mesoscopic Network Checker.
- A Node filter to highlight control plans that apply to that node in a Master Control Plan.
01 Static Assignment
A new option has been added in Static Assignments: Bi-Criteria assignment takes into account a log-normal distribution for the Value of Time for each user class.
02 Dynamic Simulators
A new Pedestrian Crossings output has been added: Pedestrian Maximum Waiting Time: Maximum calculated time pedestrians are waiting at the Pedestrian Crossing (in seconds) for the pedestrian traffic light to become green.
A new Transit Stop output on pedestrians has been added: Pedestrian Maximum Waiting Count: Maximum number of pedestrians that have been concurrently waiting for a bus at the stop in each time interval.
03 Control Plan
A new setting called Offset’s Reference Point has been added to the coordinated 2-ring control plans, substituting the previous option Match Offset with End or Beginning of Phase (which was defined at the phase level). The options are Beginning of First Coordinated Phase, Beginning of Last Coordinated Phase, and End of First Coordinated Phase.
04 OCIT Controllers
LISA controller server data directory is now available at the Project Preferences editor. All LISA emulators used in a project must be stored in the same folder.
A new button is available to Update AP Values in the OCIT Views Configuration tab folder in the controller.
Yutraffic controllers now distinguish two types of parallel reporting detectors: presence or impulse.
05 Static Transit Assignment
Crowding Discomfort functions now have a fourth argument, delay time, so that the penalty for crowding depends both on how crowded the transit segment is but also on how long it takes to go through it.
06 Previous Fast Track Features
Mesoscopic Network Checker
Queue Jump Gridlock Prevention is a new option in the Mesoscopic Network Checker, that will look for vehicles stuck in a queue waiting for a non-congested turn behind vehicles that wait for a congested turn and let them, after some time, jump the queue.
A Node filter has been added to the Master Control Plan editor, so that it is easier to identify which control plans apply to a specific node.

