
如何在Aimsun Next中模拟行人穿越人行横道
2020年9月:新的Pro技巧! 我们最新的教程视频向您展示了如何在Aimsun Next交通模型中包含行人穿越行人横道。


2020年9月:新的Pro技巧! 我们最新的教程视频向您展示了如何在Aimsun Next交通模型中包含行人穿越行人横道。

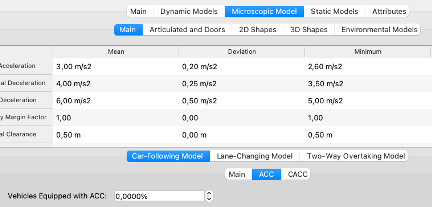
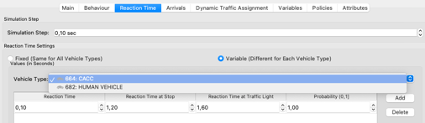
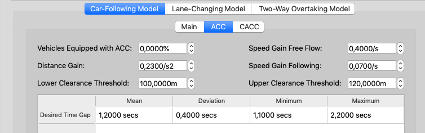
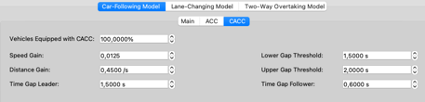
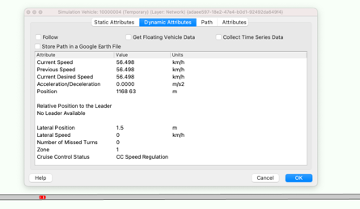
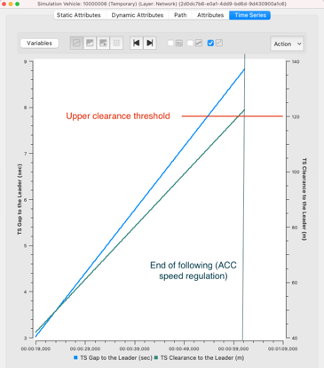
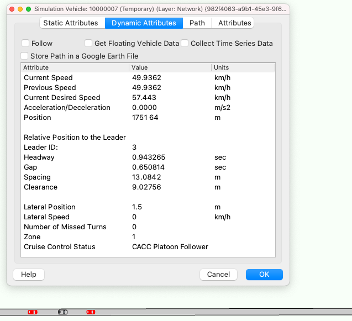
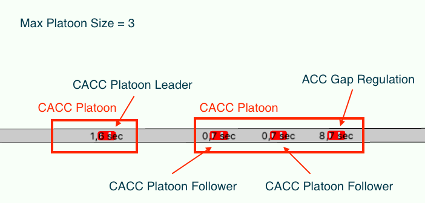
2021年10月:Martin Hartmann解释并演示了在Aimsun Next中使用配备了合作式自适应巡航控制(CACC)的车辆的微观仿真。
