
转弯惩罚函数
2017年6月:Dimitris Triantafyllos和Carles Illera解释了如何使用可以从控制计划中感知到成本的“转弯惩罚函数”,以及如何使用“交叉口延误函数”在宏观模型中模拟停车/让行标志。
你知道吗,在Aimsun 8.2中,你可以利用“转弯惩罚函数”(TPF)来感知宏观场景中选择的控制计划的成本? 在静态分配中,你是否使用过“交叉口延误函数”(JDF)来模拟停车/让行标志?
下面你会看到TPF和JDF函数的例子,它们可以用在:
Aimsun 8.2引入了TPF的能力,可以访问转弯的控制计划信息(绿灯时间和周期时间),并将这一成本纳入道路成本计算。 你会在名为“TPF-信号灯路口例子”的模板中找到一个例子。 该成本函数,以分配的流量作为变量,根据2010 Highway Capacity Manual (HCM)中的统计计算方法,计算出每个信号灯转弯的平均时间延误。
考虑以下信号灯路口的橙色标记的转弯。 在90秒的周期内,该流向有43秒的绿灯时间。

图1. 在信号灯路口,转弯绿灯时间和周期时间
1. 首先在“宏观分配场景”中分配期望的“控制计划”.
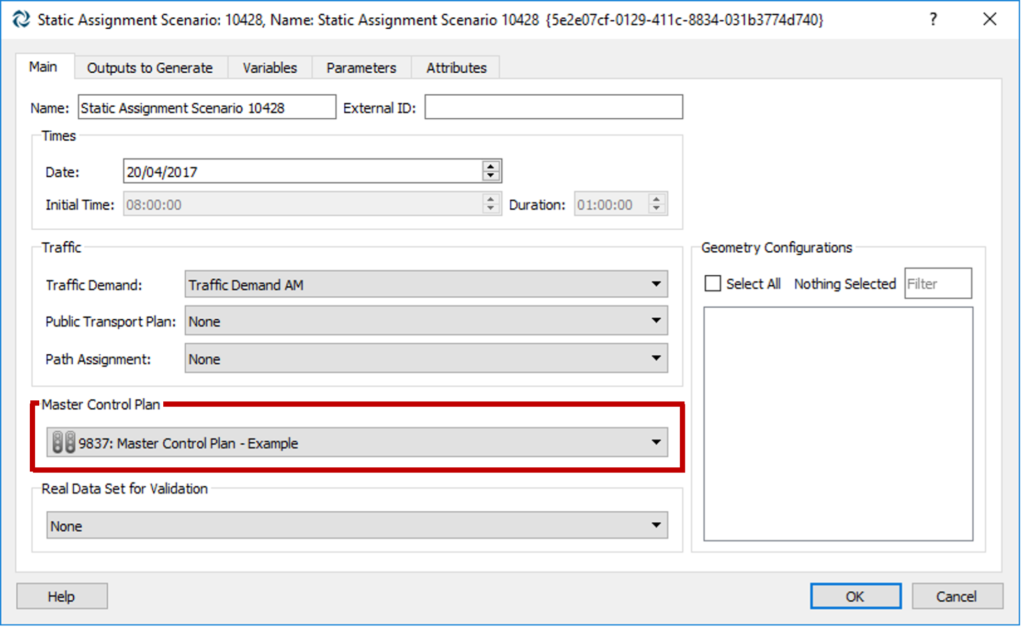
图2. 定义“静态分配场景”中的“主控制计划”
2. 然后双击转弯目标,将 “TPF-信号灯路口示例”分配给信号灯控制转弯。 请看下面的截图:
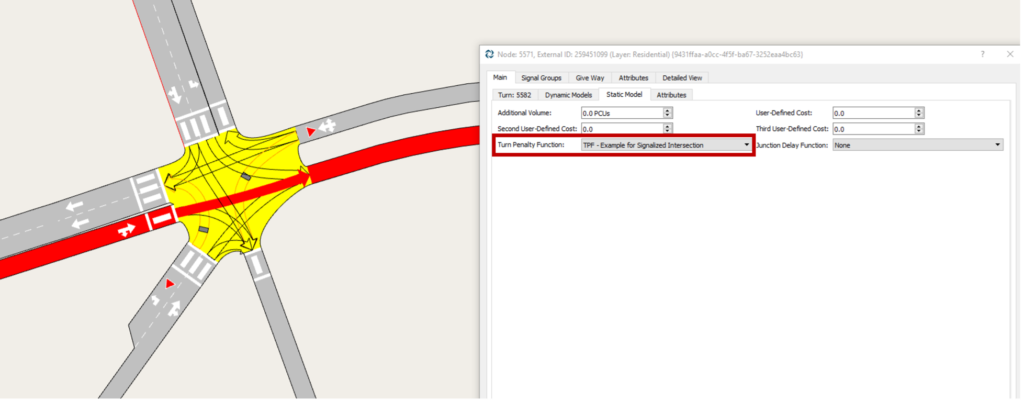
图3. 定义TPF-信号灯路口示例
3. 在执行宏观分配后,你可以看到根据分配流量计算的最终成本: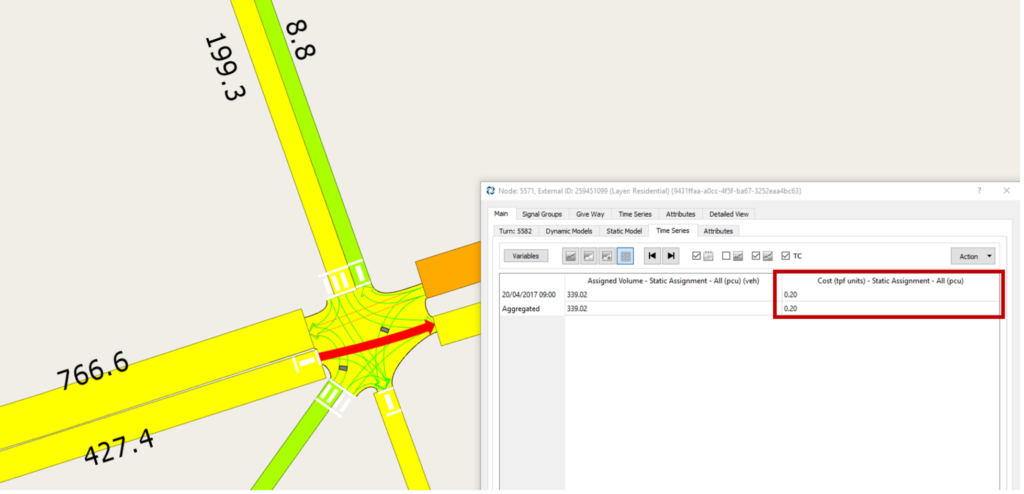
图4. 宏观分配的转弯成本
这个转弯分配的流量为339.62PCUs,相应成本为0.20分钟。
– 双击TPF目标来查看Python代码。 要绘制一个显示成本值如何随转弯的分配流量而变化的图表,请选择一个“静态分配实验”,一个“车辆类型”,然后直接点击期望的转弯。
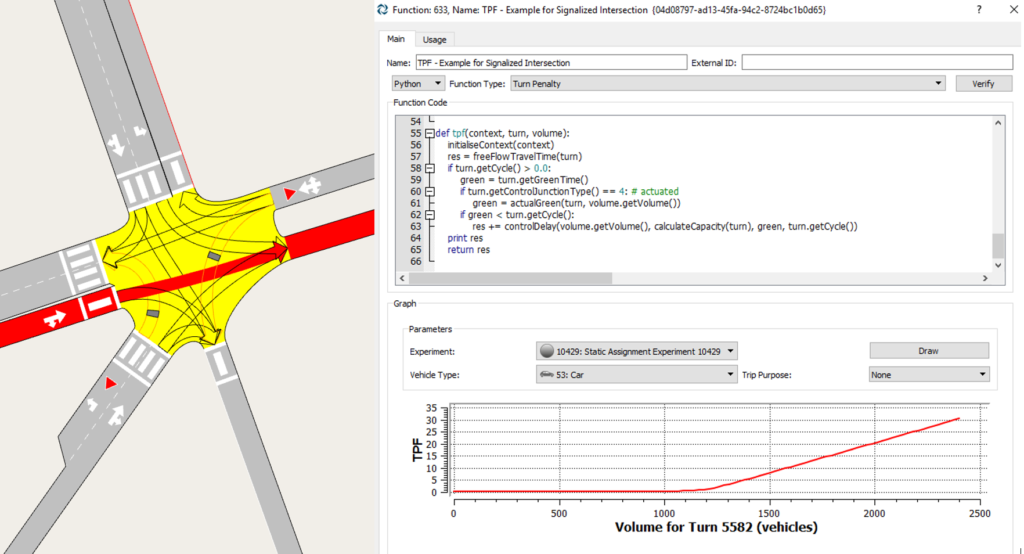
图5. 在Python编码的TPF中,显示成本如何随特定转弯的分配流量而变化的图表。
– 如果选择了带有各种控制计划的主控制计划,那么平均绿灯时间和周期时间的计算将考虑到不同的计划,每个计划根据它在场景所涵盖的时间长短进行加权。
– 如果分配了一个“触发控制计划”,那么TPF可以访问周期(被认为是固定的)和控制计划中每个阶段定义的最小和最大绿灯时间。 在TPF中执行一个函数,通过计算绿灯时长来计算延误时间。
当一个转弯有让行或停车标志时,那么另一种类型的成本函数,称为“交叉口延误函数”(Junction Delay Function – JDF),可以分配给这个转弯,以模型处理出行时间或成本作为冲突转弯流量、自身的转弯流量或出发路段流量的函数。
JDF例子:
模板提供了一个JDF的例子,可以应用于让行和停车标志,名为 “JDF-无信号灯路口的示例”。

图6. JDF-无信号灯路口的示例
这个JDF根据冲突的转弯流量来计算转弯容量。 一旦确定了容量,JDF函数就会根据其分配流量来评估该转弯的成本。
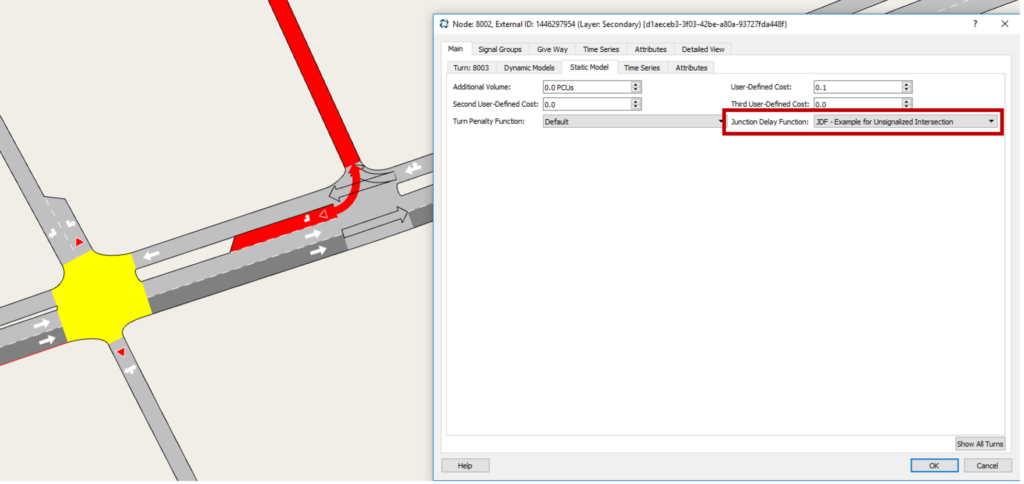
图7. “JDF-无信号路口的示例”可以在转弯目标中定义
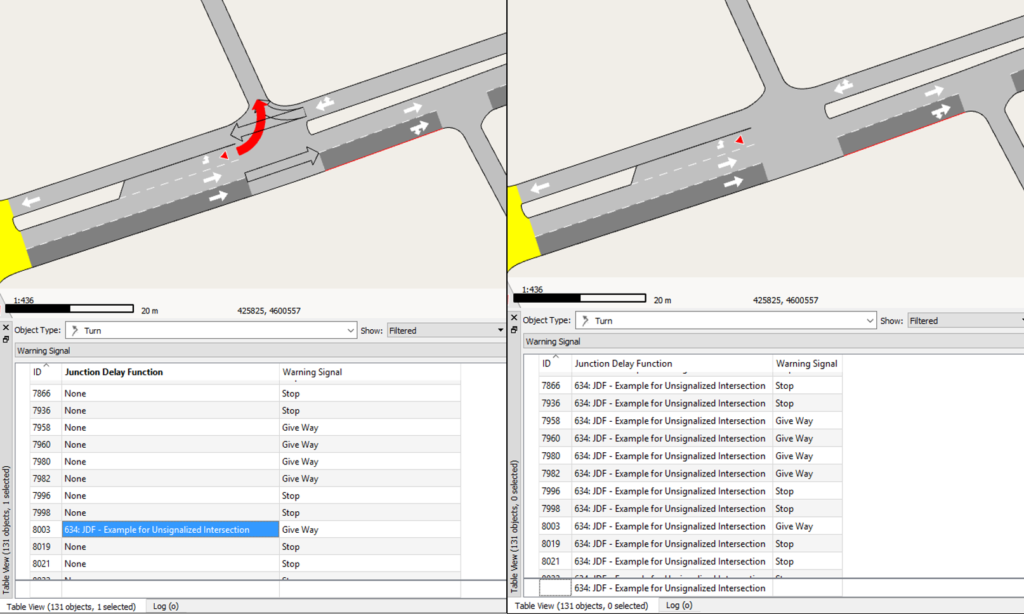
图8. 使用“表格视图”在同一目标类型下进行多次修改
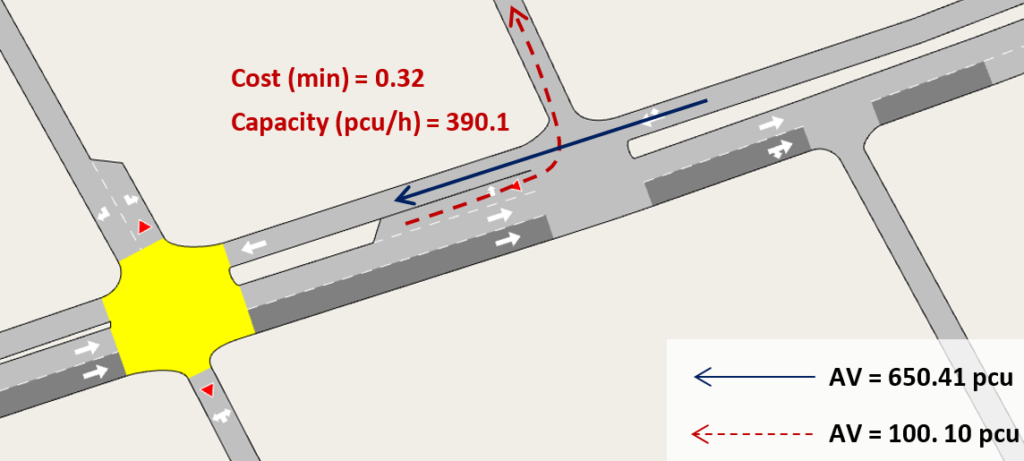
图9. 宏观分配的转弯费用
该JDF”无信号灯路口示例”是一个例子,只用于有专门的转弯车道。
如果在信号灯路口的一个转弯在绿灯阶段与其他流向有冲突(例如允许左转),创建一个新的JDF,获取信号时间和冲突量的影响。
2017年6月:Dimitris Triantafyllos和Carles Illera解释了如何使用可以从控制计划中感知到成本的“转弯惩罚函数”,以及如何使用“交叉口延误函数”在宏观模型中模拟停车/让行标志。

2021年5月:Python 2在2020年1月终结。 Tessa Hayman分享一些技巧,让你的脚本Python 3在Aimsun Next中获得最佳性能。
