Eurotunnel Flow Management and Parking

Eurotunnel wanted to use modeling to guide a decision on whether or not to develop the parking access area and what outcomes this would have on user behavior.
Eurotunnel wanted to use modeling to guide a decision on whether or not to develop the parking access area and what outcomes this would have on user behavior.
2021年3月:Tessa Hayman指导你通过Python脚本处理时间序列的复杂性,并解释如何以可以在用户界面中可视化的方式创建你的自定义时间序列。

Mar 2021: New! Now you can synchronize the geometry for co-simulation with Aimsun Next and Simcenter Prescan from Siemens Digital Industries Software.

2021年2月:你知道Aimsun Next路口(节点)可以连接到外部控制器,如西门子UTC系统SCOOT吗?

2021年1月:在第53号技术注解中,我们给出了一些关于如何根据车辆类型修改静态分配成本的技巧。 在本月的Pro技巧中,Marga Delgado解释了如何按旅行目的进行。

2020年12月:使用Aimsun Next接口与SIDRA信号设计软件,可以帮助你创建更真实的模型,减少校准工作,提高模型性能。

2020年11月:在之前的使用技巧中,我们分享了一种在动态模型中为不同类型的车辆不同限速编码的方法。 在这个月的专业技巧中,Tessa Hayman解释了如何对静态模型进行处理。

2020年10月:Tessa Hayman揭示了如何在动态模型中为不同类型的车辆设置不同的限速。

2020年9月:新的Pro技巧! 我们最新的教程视频向您展示了如何在Aimsun Next交通模型中包含行人穿越行人横道。

2020年8月:Tessa Hayman解释了Aimsun Next 20中的宏观-中观混合仿真,以及它如何将宏观和中观的优点结合起来,处理大区域尺度的模型。

A video guide to the new features in Aimsun Next for helping planners understand the movement of pedestrians, cyclists, and users of public transportation.

2020年7月:在Aimsun Next中,你现在可以在你的模型中添加不基于车道的车辆,如自行车。 在本技术注解中,我们将探讨如何在你的模型中创建自行车,并看一下一些可能的情况。

2020年6月:我们新的嵌入式行人模拟器速度超快,在主安装程序中免费提供,可模拟无限数量的行人。

2020年5月:Dimitris Triantafyllos解释了路径分配计划功能如何为你提供无与伦比的灵活性,重新使用以前计算的路径。

2020年3月:Martin Hartmann解释了一种快速而方便的方法来研究基于假设的自主和互联车辆的行为。

2019年12月:Tessa Hayman解释了如何调整环岛的参数,以确保动态模型的准确行为和校准。

2019年11月:Tessa Hayman解释了针对不同环岛布局的不同编制方法,确保车辆使用正确的车道和从入口到出口的变道行为。

2019年10月:Margarida Delgado解释了在哪里找到矩阵单元值,以及如何可视化每个型心点的期望线和的总行程。

2019年9月:Martin Hartmann解释了如何在容量校准过程中使用视图模式来更真实地模拟瓶颈效应。
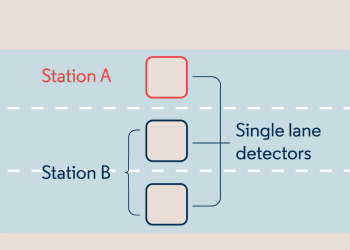
2019年8月:Emmanuel Bert分享了探测器站分组工具如何帮助你在Aimsun Next中管理路段探测器的统计数据。
