
Three ways to profile traffic demand for more efficient modeling
February 2020: Tessa Hayman shares three different ways to profile traffic demand that can help you build models efficiently.
By Martin Hartmann
October 2021
Vehicle automation attracts stakeholders that seek to predict the impacts of this technology on road traffic. The diverse stakeholder perspectives might range from high-level traffic planning policies to operational aspects for validation of perception sensors under adverse weather conditions. Aimsun covers the entire domain spectrum by offering modeling tools and services, from macroscopic models to complex real-time co-simulations of AV stacks with digital twins representing realistic traffic environments.
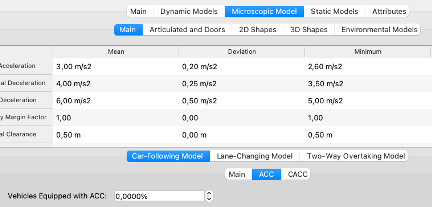
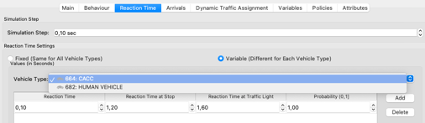
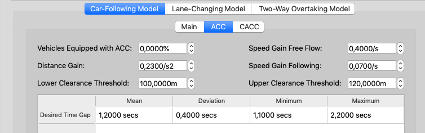
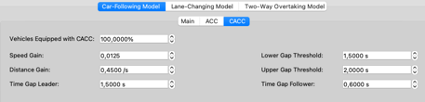
In this article, we explain and demonstrate the use of microscopic simulation of vehicles equipped with cooperative adaptive cruise control (CACC) in Aimsun Next. Since version 8.4, Aimsun Next has included a native implementation of the ACC and CACC algorithm (here labelled as C/ACC) developed by Milanes & Shladover, 2014 [1]. Hence, this technical note sets the controller implementation in the context of a microsimulation model, describes the parameter revealed to the user, and gives some practical examples from using the controller.
C/ACC vehicles exhibit car-following behavior significantly different from the conventional (in Aimsun Next: Gipps-controlled) vehicles allowing very short time gaps within the platoons of connected vehicles. Let’s summarize the most important information about the C/ACC algorithm in context of microsimulation in Aimsun Next:

Next, there are five states that apply to a CACC-equipped vehicle:

* the preceding vehicle can be a non-equipped vehicle, ACC or CACC equipped vehicle within the ACC Lower clearance threshold or CACC Lower Gap Threshold
The C/ACC model in Aimsun Next employs the CAMP forward collision warning algorithm [2]. This algorithm is included in the model to check if the gap between the subject vehicle and the leader is sufficient for safe car-following. If the CAMP algorithm is activated in any point, the C/ACC controller is disabled followed by a 20s cooldown before re-entering the last C/ACC state again.
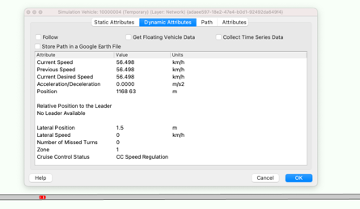
Slow down the recording and highlight the Clearance and the Cruise Control Status values
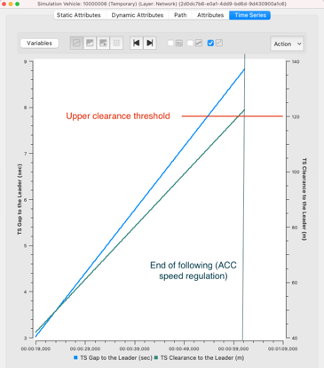
Comment: You can collect individual vehicles’ time series (TS) of both values Gap to the leader (blue line) and Clearance to the leader (green line) to visualize the behavior.
Slow down the recording and highlight the Clearance and the Cruise Control Status values
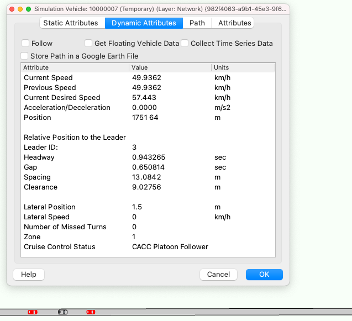
Slow down the recording and highlight the Gap and the Cruise Control Status values
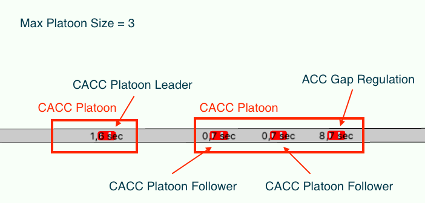
In the implemented model, a true platoon leader can be labelled with different CACC Control Status tags (even with platoon size = 1):
[1] Vicente Milanés, Steven E. Shladover. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transportation research. Part C, Emerging technologies, Elsevier, 2014, pp.285-300. 10.1016/j.trc.2014.09.001 . hal-01091160
[2] Kiefer, R.J., Cassar, M.T., Flannagan, C.A., LeBlanc, D.J., Palmer, M.D., Deering, R.K., Shulman, M.A., 2003. Forward collision warning requirements project: refining the CAMP crash alert timing approach by examining” last-second” braking and lane change maneuvers under various kinematic conditions.NHTSA Research Report HS-809 574.
[3] Nowakowski, C., J. O’Connell, S.E. Shladover, and D. Cody, 2010, “Cooperative Adaptive Cruise Control: Driver Selection of Car-Following Gap Settings Less Than One Second”, 54th Annual Human Factors and Ergonomics Society Meeting, San Francisco, CA.
February 2020: Tessa Hayman shares three different ways to profile traffic demand that can help you build models efficiently.

May 2018: Laura Oriol shares her tips for altering parameters for throughput at traffic signals and at major-minor priority junctions.
SHARE
Aimsun Next 23
Aimsun Next 20.0.5
Aimsun Next 23
@manual {AimsunManual,
title = {Aimsun Next 23 User’s Manual},
author = {Aimsun},
edition = {Aimsun Next 23.0.0},
address = {Barcelona, Spain},
year = {2023. [Online]},
month = {Accessed on: Month, Day, Year},
url = {https://docs.aimsun.com/next/23.0.0/},
}
Aimsun Next 20.0.5
@manual {AimsunManual,
title = {Aimsun Next 20.0.5 User’s Manual},
author = {Aimsun},
edition = {Aimsun Next 20.0.5},
address = {Barcelona, Spain},
year = {2021. [In software]},
month = {Accessed on: Month, Day, Year},
url = {qthelp://aimsun.com.aimsun.20.0/doc/UsersManual/Intro.html},
}
Aimsun Next 23
TY – COMP
T1 – Aimsun Next 23 User’s Manual
A1 – Aimsun
ET – Aimsun Next Version 23.0.0
Y1 – 2023
Y2 – Accessed on: Month, Day, Year
CY – Barcelona, Spain
PB – Aimsun
UR – [In software]. Available: https://docs.aimsun.com/next/23.0.0/
Aimsun Next 20.0.5
TY – COMP
T1 – Aimsun Next 20.0.5 User’s Manual
A1 – Aimsun
ET – Aimsun Next Version 20.0.5
Y1 – 2021
Y2 – Accessed on: Month, Day, Year
CY – Barcelona, Spain
PB – Aimsun
UR – [In software]. Available: qthelp://aimsun.com.aimsun.20.0/doc/UsersManual/Intro.html
