Aimsun Next Acerca de Aimsun Next Nuevas funcionalidades
Las nuevas funcionalidades de Aimsun Next
Aimsun Next 24: lo más destacado
Lanzado el 16 de abril de 2024, Aimsun Next 24 refuerza nuestro compromiso con el análisis y la optimización de las redes de transporte. Muchas de las nuevas funciones se centran en la productividad con vistas a mejorar la construcción y ejecución de modelos multimodales a gran escala para ciudades, autopistas y regiones.
He aquí algunos de los aspectos más destacados:
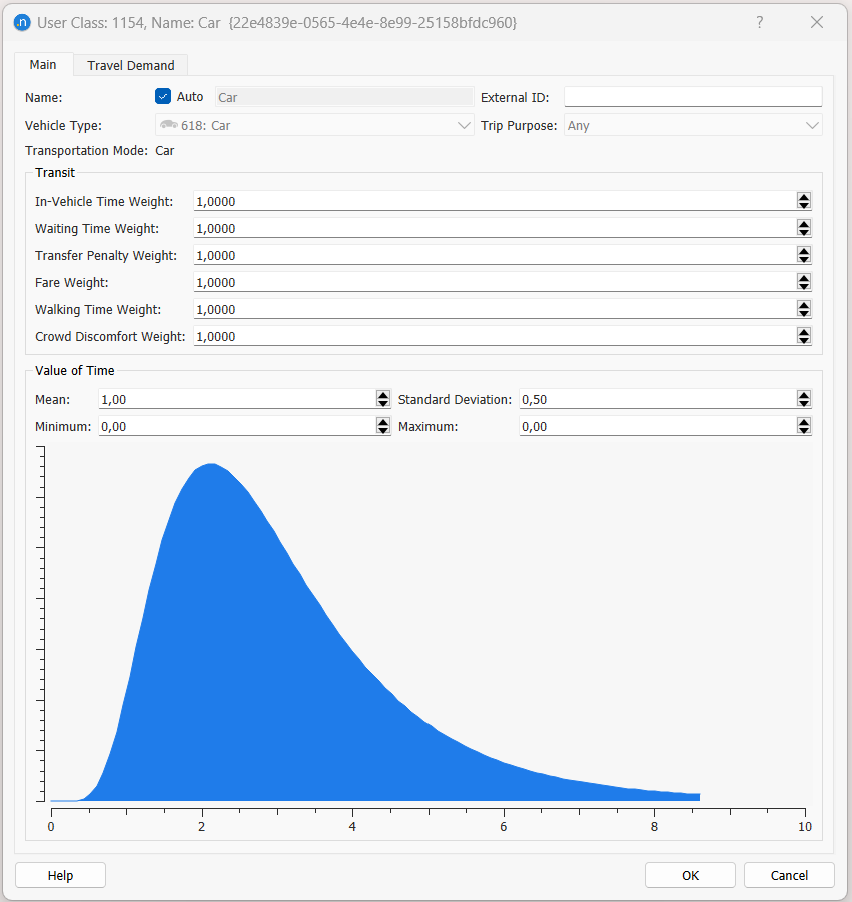
- Para ayudarle a estimar con precisión el tráfico que utiliza las autopistas de peaje, hemos añadido el método de asignación estática Bi-Criteria para tener en cuenta una distribución log-normal para el Valor del Tiempo por clase de usuario.
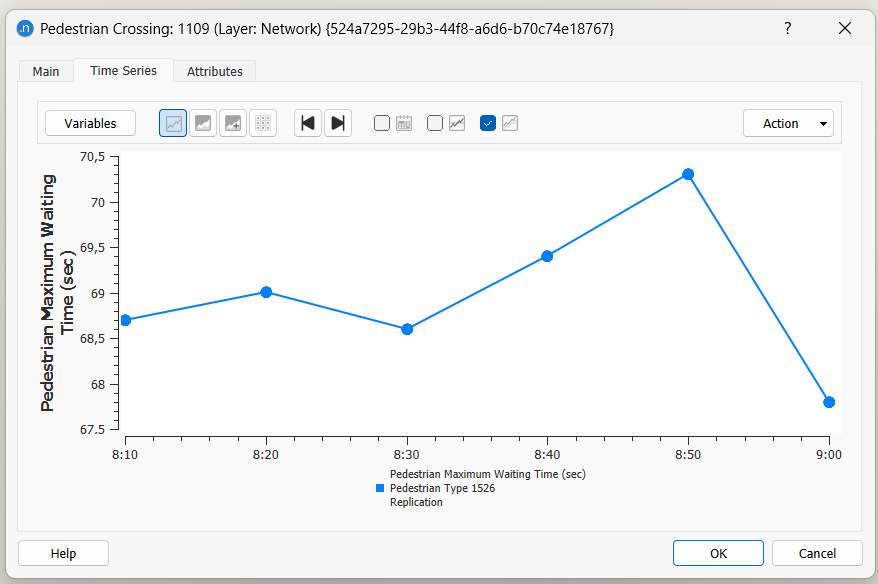
- Hemos añadido valiosas estadísticas para analizar el beneficio que supone para los peatones un cambio en la temporización de las señales o en el horario de los autobuses.
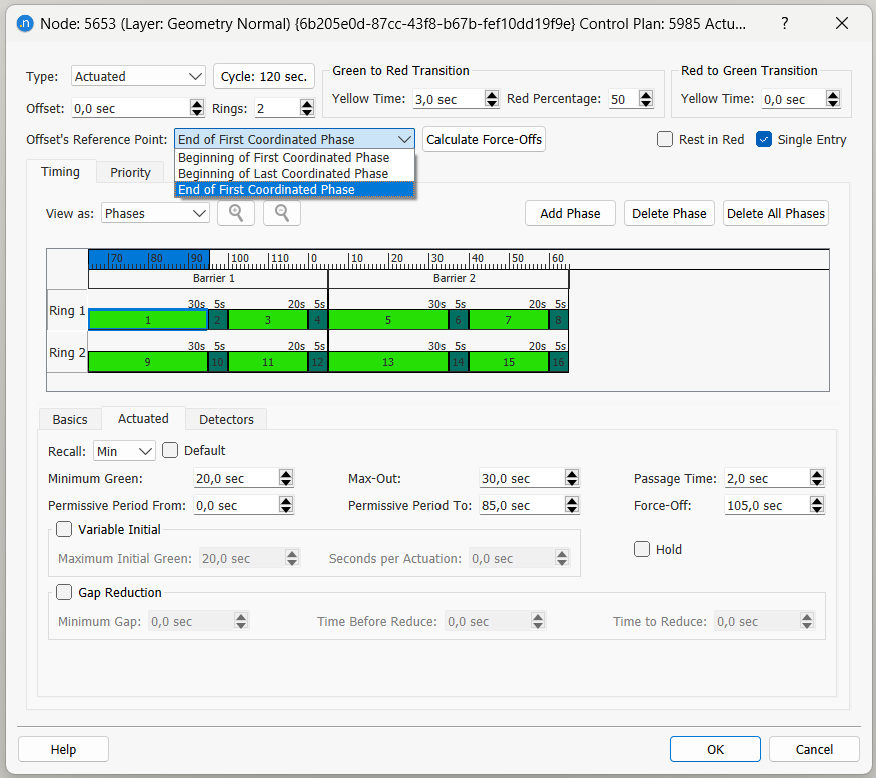
- Los planos de control coordinados con dos anillos distinguen 3 puntos de referencia de desplazamiento.
- El directorio de datos del servidor del controlador LISA se define ahora como una Preferencia de Proyecto.
- Se ha añadido un botón de actualización de valores AP a los controladores OCIT.
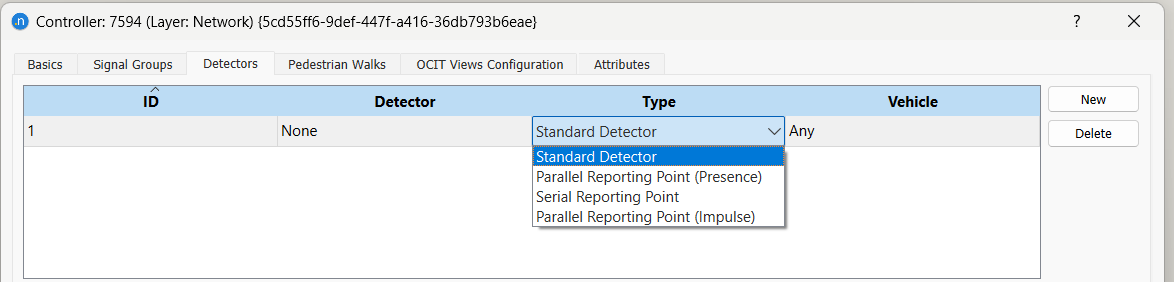
- El controlador de Yutraffic distingue ahora entre los detectores de impulsos y de presencia que informan en paralelo.
- Acceda al tiempo de viaje en transporte público Función de incomodidad por aglomeración: ahora puede ponderar la incomodidad de viajar en un autobús abarrotado por el tiempo que tiene que permanecer sentado a bordo.
Aimsun Next 24 también incluye las siguientes mejoras que fueron lanzadas como características Fast Track en versiones anteriores de Aimsun Next 23:
- Una nueva opción para la prevención de atascos por saltos de cola en el comprobador de redes mesoscópicas.
- Un filtro de nodo para resaltar los planes de control que se aplican a ese nodo en un Plan de Control Maestro.
01 Asignación estática
Se ha añadido una nueva opción en las asignaciones estáticas: la asignación Bi-Criterio tiene en cuenta una distribución log-normal para el valor del tiempo para cada clase de usuario.
02 Simuladores dinámicos
Se ha añadido una nueva salida de Pasos de Peatones: Tiempo Máximo de Espera de Peatones: tiempo máximo calculado que esperan los peatones en el paso de peatones (en segundos) a que el semáforo de peatones se ponga en verde.
Se ha añadido una nueva salida de Parada de Tránsito sobre peatones: Recuento máximo de espera de peatones: número máximo de peatones que han estado simultáneamente esperando un autobús en la parada en cada intervalo de tiempo.
03 Plan de control
Se ha añadido un nuevo ajuste denominado Punto de referencia del desplazamiento a los planes de control coordinados de 2 anillos, que sustituye a la opción anterior Coincidir desplazamiento con final o principio de fase (que se definía a nivel de fase). Las opciones son Comienzo de la primera fase coordinada, Comienzo de la última fase coordinada y Fin de la primera fase coordinada.
04 Controladores OCIT
El directorio de datos del servidor del controlador LISA está ahora disponible en el editor de preferencias del proyecto. Todos los emuladores LISA utilizados en un proyecto deben almacenarse en la misma carpeta.
Hay un nuevo botón disponible para actualizar valores AP en la carpeta de la pestaña Configuración de Vistas OCIT en el controlador.
Los controladores de Yutraffic distinguen ahora dos tipos de detectores de información paralela: de presencia o de impulso.
05 Asignación estática de tránsito
Las funciones de incomodidad por aglomeración tienen ahora un cuarto argumento, el tiempo de retraso, de modo que la penalización por aglomeración depende tanto de lo abarrotado que esté el segmento de tránsito como del tiempo que se tarde en recorrerlo.
06 Funciones anteriores de Fast Track
Comprobador de redes mesoscópicas
Queue Jump Gridlock Prevention es una nueva opción en el Mesoscopic Network Checker, que buscará vehículos atascados en una cola esperando un giro no congestionado detrás de vehículos que esperan un giro congestionado y les permitirá, pasado un tiempo, saltar la cola.
Se ha añadido un filtro de nodo al editor del Plan de Control Maestro, para que sea más fácil identificar qué planes de control se aplican a un nodo específico.
