El modelo mesoscópico de Aimsun Next ofrece una simulación basada en enlaces y carriles de vehículos individuales con un comportamiento simplificado en comparación con el utilizado en la microsimulación. Estas simplificaciones hacen que sea lo suficientemente bueno para representar las interacciones del conductor en el seguimiento del coche, el cambio de carril y la aceptación de huecos, al tiempo que se reducen los cálculos y, por tanto, el tiempo de ejecución en comparación con su homólogo microscópico más detallado.
Se ha demostrado que el modelo mesoscópico de Aimsun Next produce tiempos de viaje realistas en redes urbanas y en la mayoría de las situaciones de autopista. Sin embargo, cuando se trata del comportamiento de fusión en las rampas de acceso, la falta de comportamiento cooperativo plantea a veces un reto a la hora de calibrar la congestión producida en ese tipo de cuello de botella. Hemos reconocido la limitación y en Aimsun Next 20 introdujimos un modelo específico de comportamiento de fusión mesoscópica controlado por dos parámetros adicionales: brecha de cooperación y brecha de fusión. Esta nota técnica pretende explicar cómo se pueden utilizar estos parámetros para controlar el comportamiento de la fusión y ajustarse al flujo de tráfico observado y a la congestión.
Antecedentes
Reproducir la congestión exacta en un lugar de confluencia de carriles laterales es siempre un reto. Depende de la geometría de la carretera, y se ve muy afectado por el comportamiento de los conductores; por ejemplo, en la misma situación puedes tener un reparto muy diferente de la congestión entre la línea principal y la rampa en función del grado de cooperación.
La versión microscópica de Aimsun Next tiene varios parámetros para calibrar el comportamiento de la fusión de carriles laterales (por ejemplo, cooperación, agresividad, distancia de cooperación, distancia de fusión y opciones de fusión simultánea). Tras un análisis detallado de los datos reales en varias zonas de fusión de carriles laterales, hemos diseñado un nuevo modelo de fusión para la simulación mesoscópica. Se controla mediante dos parámetros, la brecha de cooperación y la brecha de fusión.
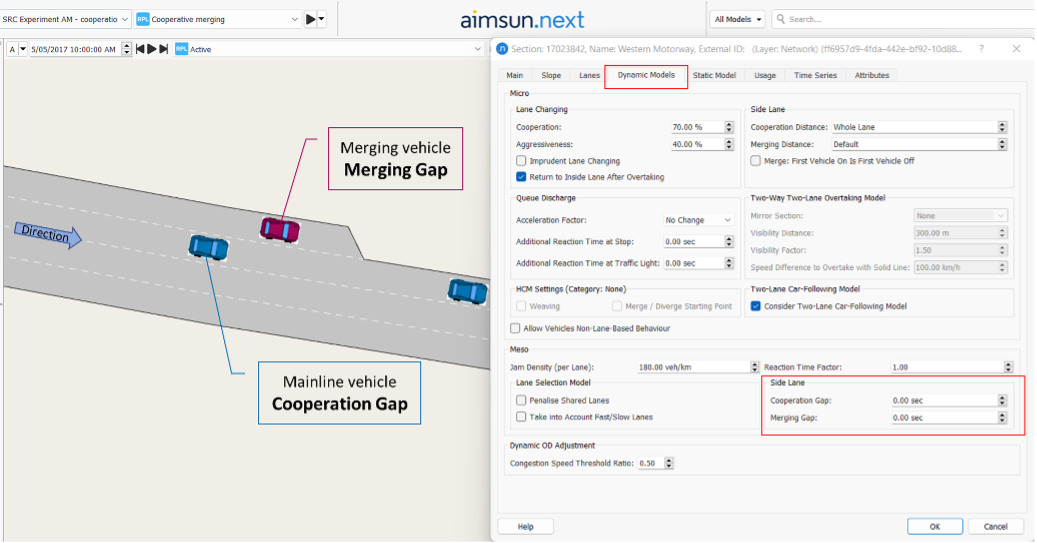
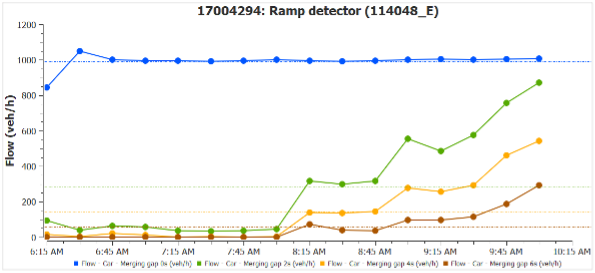
Espacio de cooperación: Es la holgura (en segundos) que los vehículos de la línea principal se verán obligados a tener al salir del tramo siempre que haya vehículos en fusión en la rampa. Esto es para facilitar la incorporación del tráfico. Así, se puede conseguir un mayor grado de cooperación del tráfico principal aumentando el valor de este parámetro. El valor por defecto es 0,0 seg. y significa que no hay cooperación, lo que es igual que en las versiones anteriores. Sólo se retrasarán los vehículos del primer carril principal adyacente al carril lateral. Cuando aumenta el espacio de cooperación, el flujo de incorporación del carril lateral debería aumentar a costa de una mayor congestión en el carril adyacente de la línea principal.
Espacio de incorporación: Es el espacio mínimo que buscan los vehículos del carril lateral (rampa de acceso) para incorporarse a la línea principal. Cuando aumenta el espacio de fusión, disminuye la probabilidad de que el flujo de fusión provenga del carril lateral.
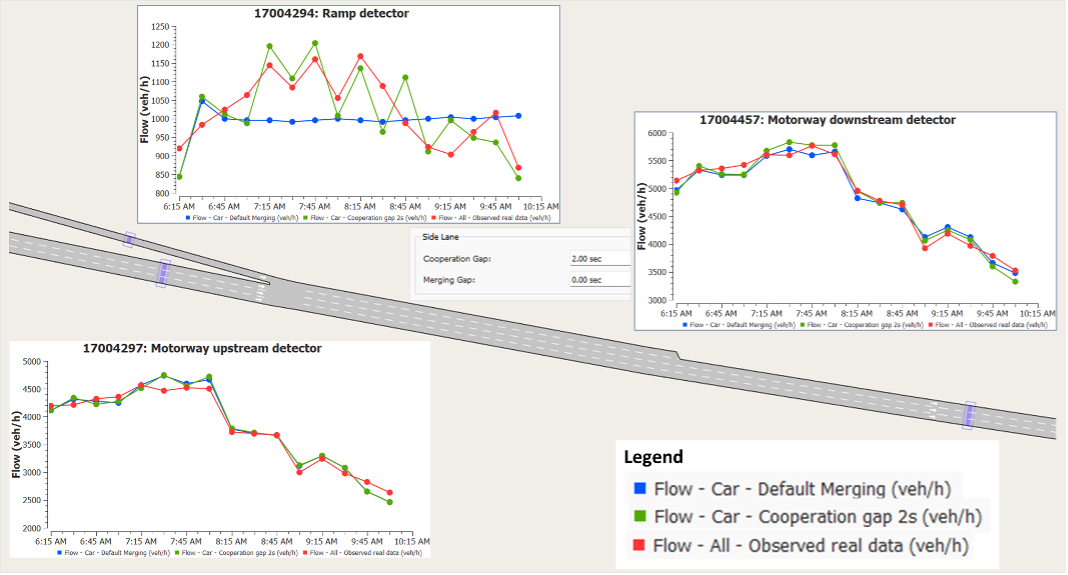
Estos dos parámetros se encuentran en una sección de fusión en la pestaña “Modelos dinámicos”, como se destaca en la Figura 1. Ambos ofrecen retrasos adicionales al vehículo para pasar al siguiente tramo descendente. Con un enfoque de prueba y error, estos dos parámetros pueden ayudar eficazmente a imitar el comportamiento de fusión de carriles laterales en cualquier circunstancia. Como el modelo mesoscópico no ofrece una visualización en 2D del comportamiento individual de los conductores, hay que dar prioridad a la adecuación del flujo (y de la velocidad) en los tramos de carretera de la línea principal y de los carriles laterales.