So verwenden Sie den neuen Pfadzuweisungsplan in Aimsun Next
Mai 2020: Dimitris Triantafyllos erklärt, wie die Path Assignment Plan-Funktion Ihnen eine unvergleichliche Flexibilität bei der Wiederverwendung zuvor berechneter Pfade bietet.
Im zweiten Teil dieser Serie über das Drücken der mesoskopischen Kalibrierung auf das Maximum untersucht Laura Oriol, wie Parameter für den Durchsatz an Ampeln und an wichtigen, prioritären Kreuzungen geändert werden können. Diese Tipps sollen Ihnen zeigen, wie Sie den unnötigen Wechsel von Meso zu Micro vermeiden und Letztendlich Ihren Workflow beschleunigen können.
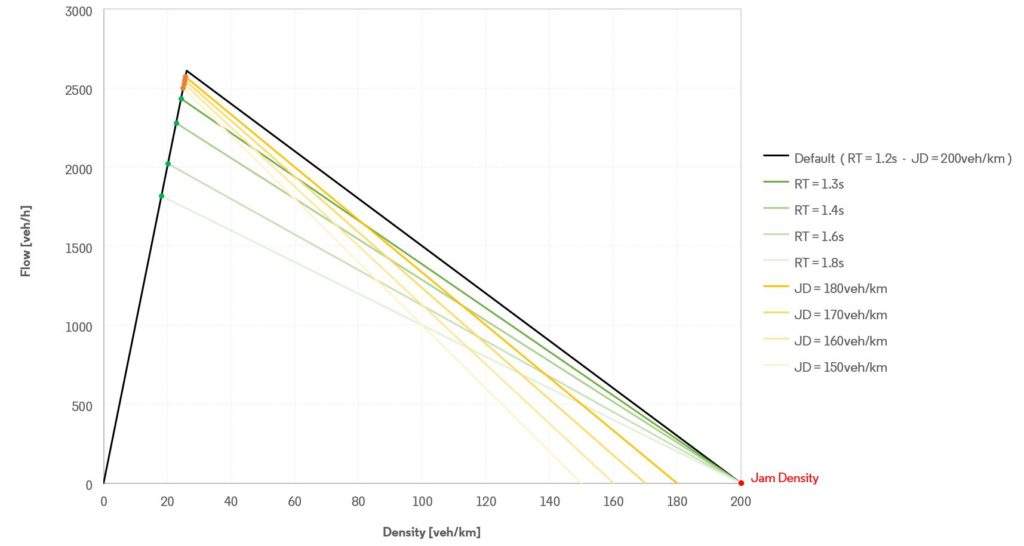
Das mesoskopische Auto-Following-Modell ist eine Vereinfachung des Gipps-Autofolgemodells, das in der mikroskopischen Simulation verwendet wird. Wenn alle Fahrzeuge die gleichen Parameter haben, erzeugt dieses Modell ein dreieckiges Dichte-Flow-Diagramm (siehe Abbildung 1), das mit drei Variablen definiert werden kann:
Die Freilaufgeschwindigkeit ist die Geschwindigkeit, die auftritt, wenn Dichte und Durchfluss Null sind. In Aimsun Next hängt es von der maximal zulässigen Geschwindigkeit des Abschnitts/der Drehung, der Geschwindigkeitsannahme des Fahrzeugs und der maximalen Geschwindigkeit des Fahrzeugs ab. Sie wird durch die positive Steigung des dreieckigen Dichte-Flow-Diagramms dargestellt.
Die Reaktionszeit wirkt sich auf den maximalen Durchsatz und die Warteschlangenausbreitungsgeschwindigkeit (die negative Neigung des dreieckigen Dichte-Flow-Diagramms) aus. Bei Freilaufbedingungen und ohne Spurwechsel ist der Wert, der die Konsistenz des Vorlaufs und damit des Durchsatzes zwischen Mikro und Meso gewährleistet, RTmeso = 1,5 RTmicro. In Abbildung 1 können wir beobachten, wie der Durchsatz durch die Erhöhung der Reaktionszeiten reduziert wird.
Jam Density bezieht sich auf die maximale Verkehrsdichte, die im Abschnitt beobachtet werden kann (wenn Fahrzeuge stehen; sie entspricht dem roten Punkt im Diagramm in Abbildung 1. In der nach dem Auto folgenden Formel wird der Staudichteparameter des Abschnitts nicht verwendet; Stattdessen wird die effektive Länge des Fahrzeugs verwendet, d. h. die Summe der Länge und des Abstands des Fahrzeugs, deren Gegenleistung als Staudichte interpretiert werden kann.
In Aimsun Next wird der Staudichteparameter des Abschnitts nur in Warteschlangen-Spillback-Situationen verwendet: um zu bestimmen, ob eine Spur voll ist, und um zu berechnen, wie lange das erste Fahrzeug eine volle Warteschlange verlässt, kann ein anderes Fahrzeug an der Rückseite der Warteschlange teilnehmen. In Abbildung 1 sehen Sie, wie sich die Reduzierung der Staudichte (d. h. die Erhöhung der effektiven Länge der Fahrzeuge) nur geringe Auswirkungen auf den Durchsatz ausgibt, obwohl sie sich erheblich auf die Ausbreitungsgeschwindigkeit der Warteschlange auswirkt.
In der mesoskopischen Simulation werden Fahrzeuge entweder angehalten oder fahren mit der gewünschten Geschwindigkeit, da es im folgenden Modell des Fahrzeugs keine Beschleunigung oder Verzögerung gibt, anders als in der mikroskopischen Simulation. Diese Vereinfachung muss in allen Situationen berücksichtigt werden, in denen Beschleunigung und Verzögerung eine wichtige Rolle spielen. Dies ist der Fall bei Verkehrszeichen oder Ampeln, wo die fehlende Beschleunigung und Verzögerung zu einer Überschätzung des Durchflusses führen kann, es sei denn, sie wird durch die Kalibrierung anderer Parameter kompensiert.
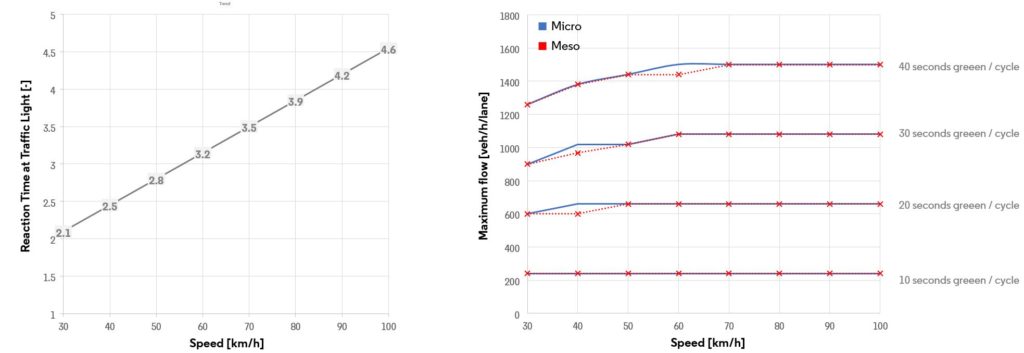
An signalisierten Kreuzungen ist es möglich, den Parameter Reaktionszeit an der Ampel (RTTL) zu verwenden, um im Meso einen Durchsatz zu erzeugen, der konsistenter mit micro ist. Dieser Parameter wird verwendet, um die Reaktionszeit des ersten Fahrzeugs zu erhöhen, das an der Ampel angehalten wurde, wenn es auf Grün schaltet. Daher kann es verwendet werden, um den Mangel an Beschleunigung zu kompensieren.
Wenn wir die Standard-Reaktionszeit bei Ampel 1.6s verwenden, ist die mesoskopische Simulation zu optimistisch, da sie höhere Ströme erreicht. Hinweis in Abbildung 2, für den speziellen Fall der 1h-Simulation und eines Ampelzyklus von 60 Sekunden, dass dieser Unterschied deutlicher wird, je höher die Geschwindigkeiten und desto kürzer die grünen Zeiten.

Eine Erhöhung der Reaktionszeit an der Ampel im Meso reicht aus, um die Differenz auszugleichen. Der Wert, der eine gute Übereinstimmung liefert, hängt hauptsächlich von der Geschwindigkeitsbegrenzung ab (Abbildung 3). Beispielsweise wird in städtischen Gebieten, in denen Ampeln erwartet werden und typische Geschwindigkeiten im Bereich von etwa 50 km/h liegen, die Einstellung eines Reaktionszeit-Parameters bei Ampel n 2,8s die zuvor genannten Unterschiede durch Beschleunigung und Verzögerung kompensiert.
In wichtigen Vorrangkreuzungen weicht der Verkehr auf der Nebenstraße dem Verkehr auf der Hauptstraße. Es ist die häufigste Form der Kreuzungssteuerung und wird normalerweise durch Weg- oder Stoppzeichen gesteuert. Wie bereits erwähnt, ist dies eine weitere Situation, die eine sorgfältige Kalibrierung erfordert, um konsistente Ergebnisse zwischen mesoskopischer und mikroskopischer Simulation zu erzielen, da Beschleunigung und Verzögerung eine wichtige Rolle spielen. Dies gilt für eine einfache T-Kreuzung, die durch eine Wegweise oder ein Stoppschild gesteuert wird, wie in Abbildung 4.
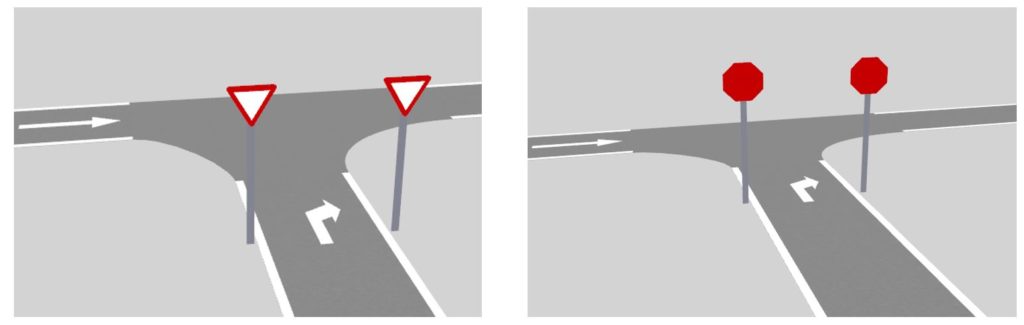
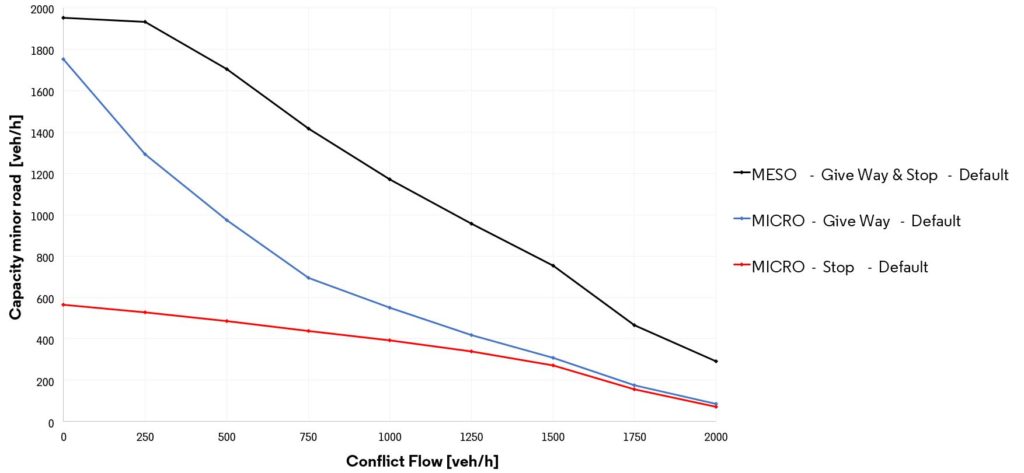
In einer mesoskopischen Simulation impliziert der Mangel an Beschleunigung und Verzögerung, dass Weg- und Stoppzeichen das gleiche Verhalten erzeugen, während in einer mikroskopischen Simulation der Unterschied signifikant ist. Wenn ein Fahrzeug auf ein Stoppschild stößt, stoppt es vollständig, bevor es das Lückenakzeptanzmodell anwendet, aber wenn es auf einen Weg stößt, beginnt es, das Modell anzuwenden, wenn der Abstand vom Fahrzeug zum Ende des Abschnitts kleiner als der Sichtabstand ist. Durch die Erhöhung des Durchflusses auf der Hauptstraße (Konfliktfluss) einer einfachen T-Kreuzung und die Aufrechterhaltung einer konstant hohen Nachfrage auf der Nebenstraße werden die in Abbildung 5 dargestellten Ergebnisse ermittelt.
Es ist klar, dass in der mesoskopischen Simulation eine Kalibrierung erforderlich ist. Ein guter Anfang für die Kalibrierung der mesoskopischen Parameter besteht darin, den Fall für den Konfliktfluss null, d.h. keinen Fluss auf der Hauptstraße zu untersuchen. Es ist möglich, den Parameter Reaktionszeitfaktor auf dem Abschnitt zu erhöhen oder eine niedrigere Geschwindigkeit auf die betroffene Drehung anzuwenden, um den Sättigungsfluss zu reduzieren.
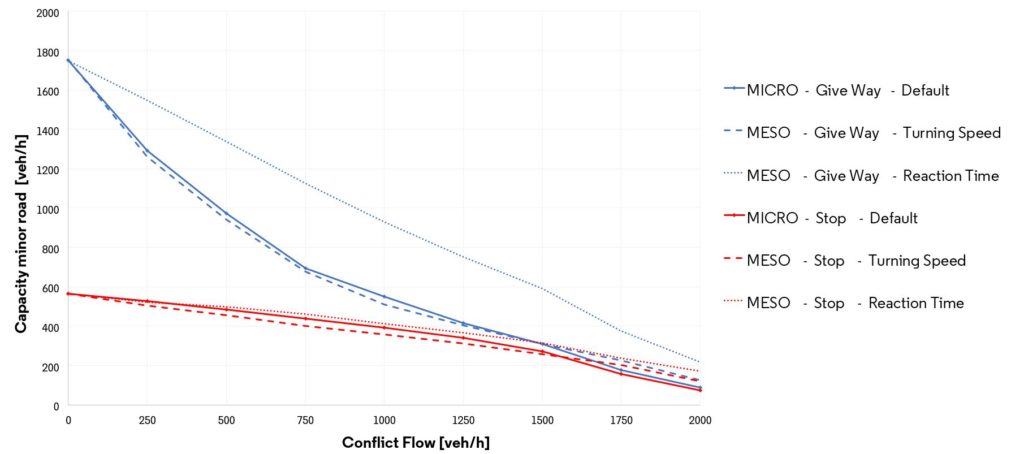
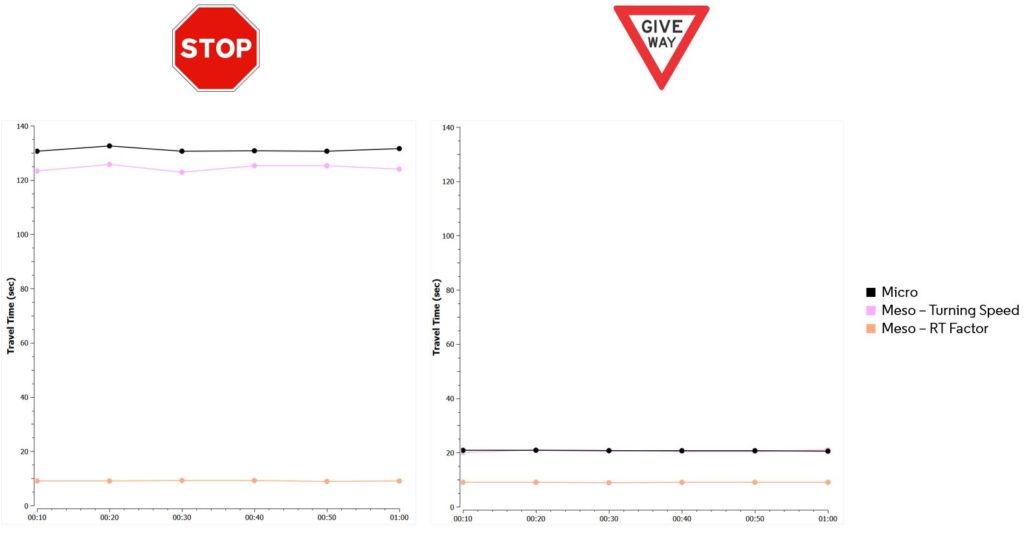
Die Ergebnisse deuten darauf hin, dass es besser ist, Geschwindigkeitsüberschreibung beim Abbiegen als beim Reaktionszeitfaktor zu verwenden, da wir sowohl die Strömungen als auch die Fahrzeiten auf dem nebensäumigen Straßenabschnitt näher bringen (siehe Abbildung 6 und Abbildung 7 ). Darüber hinaus gilt der Reaktionszeitfaktor für alle Drehungen, die aus dem Abschnitt kommen, während die Drehgeschwindigkeitsüberschreibung nur die ausgewählte Kurve betrifft.
Mai 2020: Dimitris Triantafyllos erklärt, wie die Path Assignment Plan-Funktion Ihnen eine unvergleichliche Flexibilität bei der Wiederverwendung zuvor berechneter Pfade bietet.

Februar 2018: Geline Canayon und Laura Torres geben dir eine kurze Führung durch das Wie, Wann, Wo und Warum der hybriden Simulation.
