Wussten Sie, dass Sie in Aimsun 8.2 jetzt eine Turning Penalty Function (TPF) verwenden können, die die Kosten aus einem im Makroszenario ausgewählten Kontrollplan erfasst? Haben Sie jemals Junction Delay Functions (JDF) verwendet, um Stopp-/Ertragszeichen während einer statischen Zuweisung zu modellieren?
Nachfolgend finden Sie Beispiele für TPF- und JDF-Funktionen, die verwendet werden können unter:
- Signalisierte Schnittpunkte
- Ertrags-/Stoppzeichen
-
Signalisierte Schnittmengen
Aimsun 8.2 führt die Fähigkeit des TPF ein, auf die Kontrollplaninformationen (grüne Zeit und Zyklusdauer) eines Zuges zuzugreifen und diese Kosten in die Berechnung der Verknüpfungskosten einzubeziehen. Sie finden ein Beispiel in der Vorlage ‚TPF – Beispiel für signalisierte Schnittmenge‘. Diese Kostenfunktion berechnet in Abhängigkeit vom zugewiesenen Volumen die durchschnittliche Verzögerung jeder signalisierten Drehung basierend auf der statistischen Berechnung im Highway Capacity Manual (HCM 2010).
TPF-Beispiel:
Betrachten Sie die orange markierte Kurve an der folgenden signalisierten Kreuzung. Diese Bewegung erhält 43 Sekunden grün während des 90-Sekunden-Zyklus.
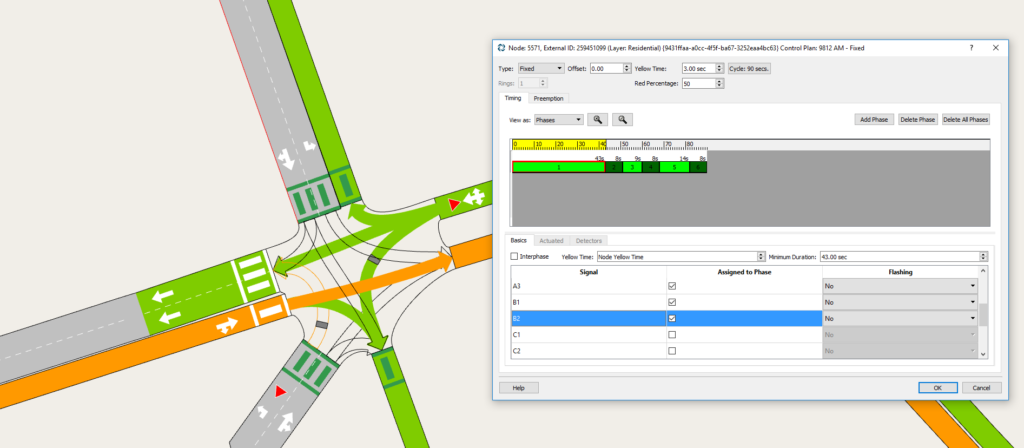
Abbildung 1. Grüne Zeit und Zykluszeit an signalisierter Kreuzung
- Weisen Sie zunächst den gewünschten Steuerungsplan innerhalb des Makrozuweisungsszenarios zu.
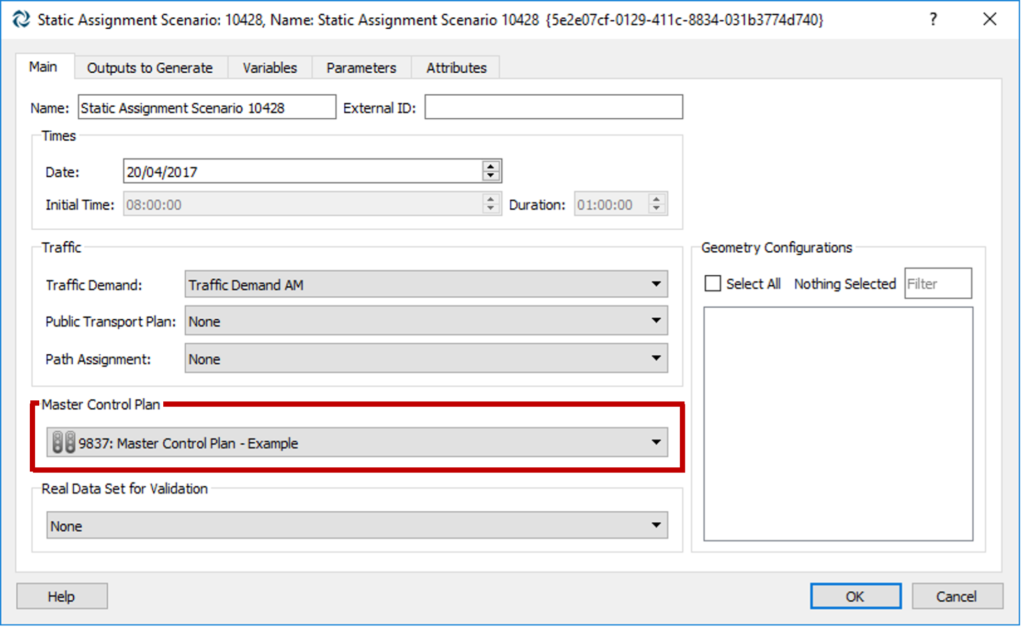
Abbildung 2. Definition des Mastersteuerungsplans im Szenario statische Zuweisung
- Weisen Sie dann die ‚TPF – Beispiel für Signalisierte Kreuzung‘ der signalisierten Drehung zu, indem Sie auf das Drehobjekt doppelklicken. Siehe den folgenden Screenshot:
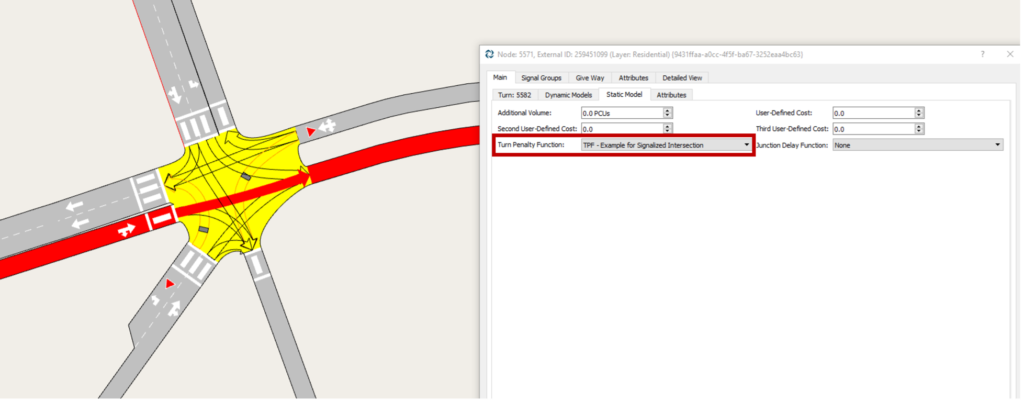
Abbildung 3. Definition des TPF – Beispiel für signalisierte Schnittmenge
- Nach der Ausführung einer Makrozuweisung können Sie die endgültigen Kosten sehen, die basierend auf dem zugewiesenen Volumen berechnet werden:
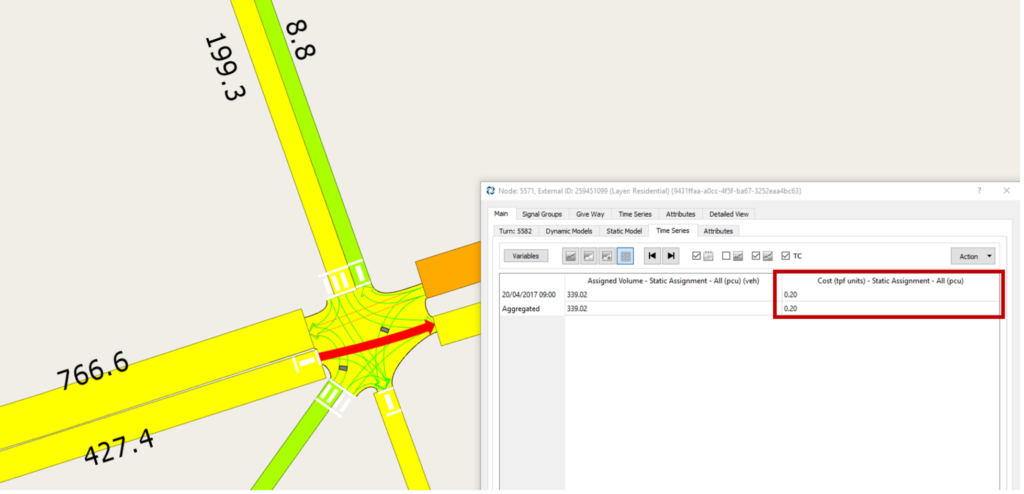
Abbildung 4. Kosten eines Turnbeitrags zu einer Makrozuweisung
Das zugewiesene Volume in dieser Kurve kam aus 339,62 PCUs, und die entsprechenden Kosten 0,20 Minuten.
Hinweise
– Doppelklicken Sie auf das TPF-Objekt, um den Python-Code zu überprüfen. Um ein Diagramm zu zeichnen, das zeigt, wie der Kostenwert mit dem zugewiesenen Volumen des Zuges variiert, wählen Sie ein statisches Zuweisungsexperiment, einen Fahrzeugtyp aus, und klicken Sie dann einfach auf die gewünschte Kurve.
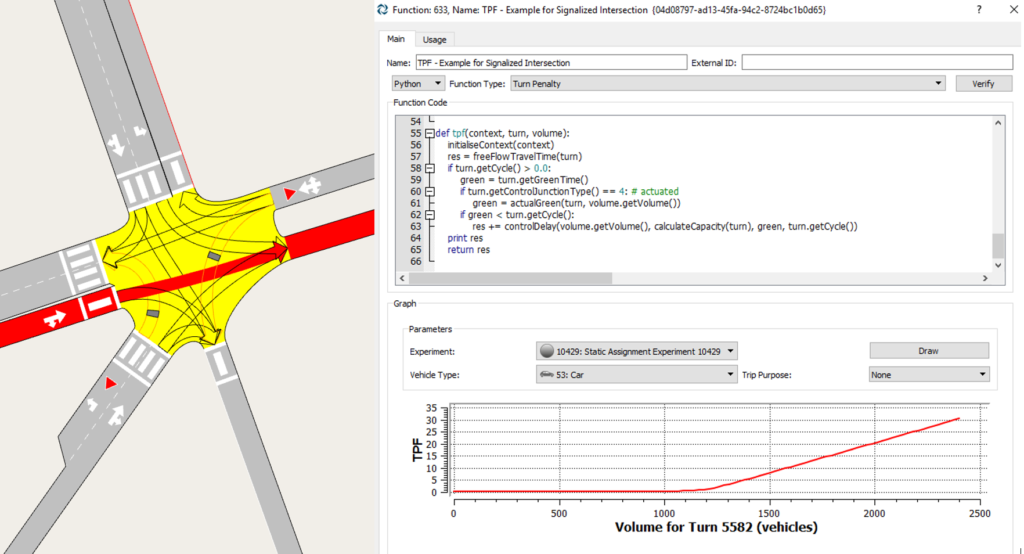
Abbildung 5. Ein Diagramm, das zeigt, wie die Kosten mit dem zugewiesenen Volume für eine bestimmte Drehung innerhalb der Python-codierten TPF variieren
– Wenn ein Master control Plan mit verschiedenen Steuerungsplänen ausgewählt ist, wird die durchschnittliche Grünzeit und Zykluszeit unter Berücksichtigung der verschiedenen Pläne berechnet, die jeweils mit ihrer relativen Dauer innerhalb des im Szenario abgedeckten Zeitraums gewichtet werden.
– Wenn ein betätigter Kontrollplan zugewiesen wird, hat der TPF Zugriff auf den Zyklus (als fest betrachtet) und auf die Minimun- und maximale Grünzeit, die für jede Phase im Kontrollplan definiert ist. Sie sind für die Implementierung einer Funktion im TPF verantwortlich, die die grüne Dauer berechnet, die bei der Berechnung der Verzögerung zu berücksichtigen ist.
Ertrags- und Stoppzeichen
Wenn eine Ausbeute oder ein Stoppzeichen einer Drehbewegung zugeordnet ist, kann diesem Zug eine andere Art von Kostenfunktion, die so genannte Junction Delay Function (JDF), zugewiesen werden, um die Fahrzeit oder die Kosten als Funktion von in Konflikt stehenden Drehvolumen, dem eigenen Drehvolumen oder dem Volumen des Ursprungsabschnitts zu modellieren.
JDF-Beispiel:
Die Vorlage stellt ein Beispiel für solche JDF bereit, die bei Ertrags- und Stoppzeichen mit dem Namen „JDF – Beispiel für nicht signalisierte Schnittmenge“ angewendet werden können.

Abbildung 6. JDF – Beispiel für nicht signalisierte Schnittmenge
Dieser JDF berechnet die Drehkapazität in Abhängigkeit von den in Konflikt stehenden Drehvolumina. Sobald die Kapazität ermittelt wurde, wertet die JDF-Funktion die Kosten des Zugs basierend auf dem zugewiesenen Volume aus.
- Zunächst muss diese Funktion einem bestimmten Zug zugewiesen werden:
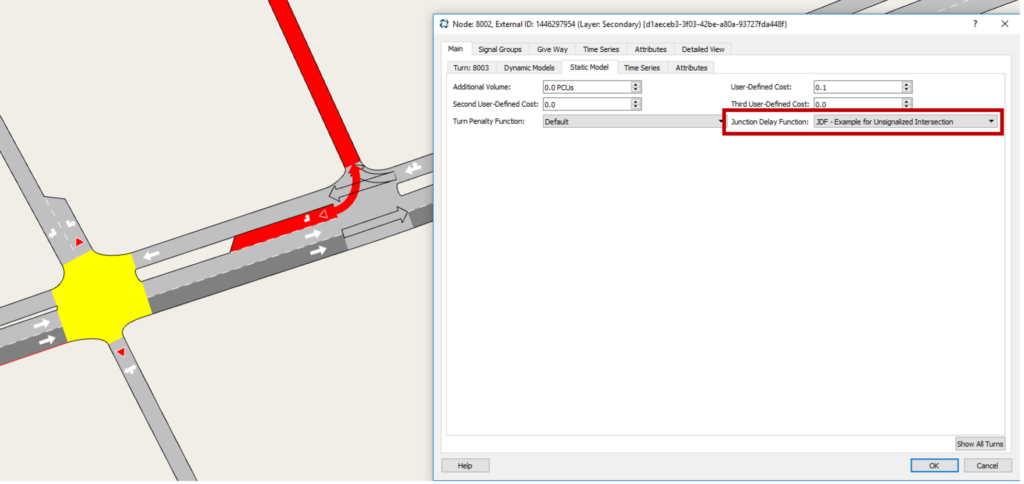
Abbildung 7. JDF – Beispiel für unsignalisierte Schnittmenge kann im Drehobjekt definiert werden
- Um diese Kostenfunktion auf alle Drehungen mit Stopp- oder Ertragszeichen anzuwenden, verwenden Sie das Werkzeug Tabellenansicht, um ein Attribut mehrerer Objekte desselben Typs zu ändern. Wählen Sie einfach alle Umdrehungen aus und verwenden Sie den Filter, um nur Kurven mit einer Ausbeute oder einem Stoppzeichen auszuwählen. Weisen Sie dann die Knotenverzögerungsfunktion allen gefilterten Kurven zu.
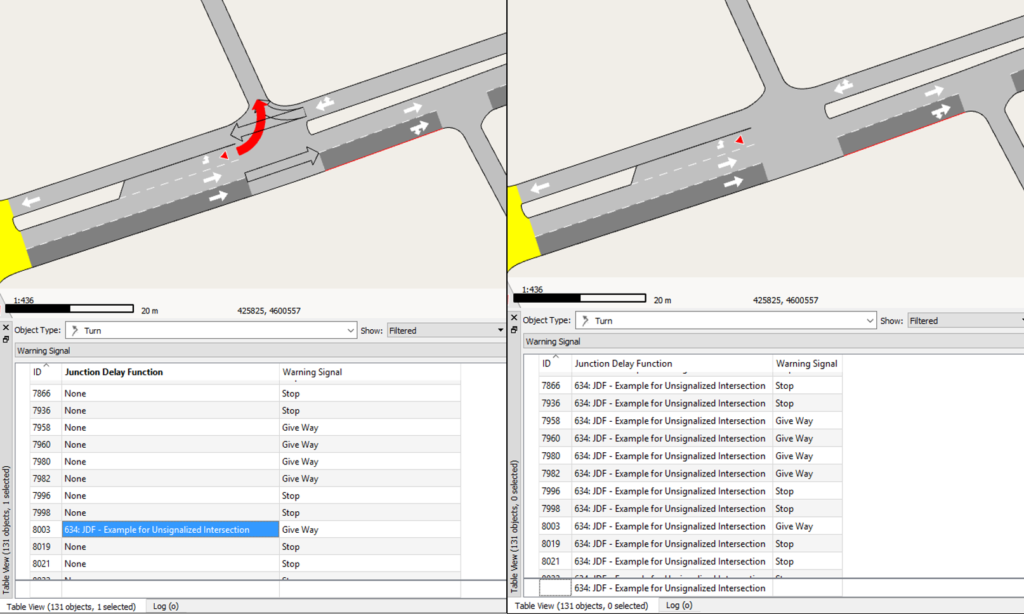
Abbildung 8. Verwenden der Tabellenansicht zum Ausführen mehrerer Änderungen am gleichen Objekttyp
- Starten Sie schließlich ein Makrozuweisungsexperiment, um die folgenden Ergebnisse anzuzeigen:
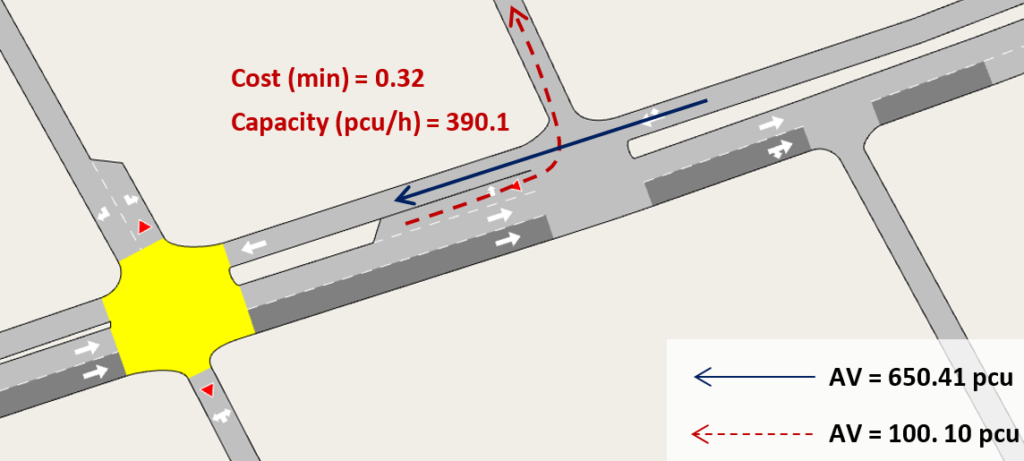
Abbildung 9. Kosten für Umdrehungen für eine Makrozuweisung
Hinweis
Dieses JDF -Beispiel für unsignalisierte Schnittpunkte ist ein Beispiel und kann nur für Kurven mit einer dedizierten Spur verwendet werden.
Signalisierte Wendungen mit Ertrags- oder Stoppzeichen
Wenn eine Drehung an einer signalisierten Kreuzung Konflikte mit anderen Bewegungen während der Grünphase hat (z.B. erlaubte Linkskurve), erstellen Sie einen neuen JDF, der die Auswirkungen sowohl des Signaltimings als auch des widersprüchlichen Volumens erfasst.