Towards agent-based models: simulating multimodal transport systems

Lampros Yfantis
Scientific Researcher at Aimsun

How can we explicitly represent, simulate and evaluate within-day behavioural (demand) and operational (supply) dynamics in emerging multi-actor passenger and freight transport systems? The answer lies in agent-based simulation approaches, which Aimsun has been facilitating within the H2020 HARMONY project via its novel Aimsun Ride platform.
The increasing transportation infrastructure costs as well as the need for immediate and drastic measures to reduce traffic congestion and air-quality deterioration in metropolitan areas have highlighted the importance of mobility and freight transport (demand) management policies within the available transport supply. The transport modelling community has made evident the limitations of traditional, statistically-oriented, trip-based demand modelling approaches in capturing individuals’ and firms’ complex responses to such interventions, and encouraged a shift to behaviourally-oriented activity-based models [1] [2] [3]. At the same time, the emergence of new disruptive technologies and shared transport services necessitated the extension of traffic simulation tools with new features for evaluating the deployment of such fleet-based services and their varying management operations.
Towards sustainable policy making in the new mobility era, planning authorities are faced, among others, with the challenge of transitioning to, developing and applying such new and extended modelling paradigms. The H2020 HARMONY project envisaged of addressing this need by developing a software-agnostic agent-based transport demand and supply simulation platform, i.e., the HARMONY Model Suite (MS). As part of the project, Aimsun facilitated and enabled the integration of external agent-based demand and (mobility or freight) service management modules (controllers) with our traffic modelling toolkit, by extending and applying the Aimsun Ride simulation platform.
Aimsun Ride is an Aimsun Next plugin which has been originally developed to support the deployment of new shared and on-demand mobility concepts by modelling and evaluating the performance of fleet management operations in a simulation environment. In the HARMONY project’s context, the simulation platform’s functionality has been further extended to address the project’s requirements and enable the evaluation of new interventions for innovative passenger and freight transport in Oxfordshire, UK and Rotterdam, NL, respectively. More specifically, the main principles guiding the extension and application of Aimsun Ride are:
1. Facilitating the integration of Aimsun Next with agent-based multimodal demand models at both day-to-day and within-day modelling levels, and thus, supporting simulation-based evaluation of demand management strategies
2. Facilitating the simulation of transportation demand at the agent level (fully or partially with background traffic) and, thus, avoiding loss of disaggregate traveller information (which would be the case if OD matrix aggregation was applied), as well as enabling simulated data feedbacks at the same disaggregate level.
3. Facilitating the simulation of disrupting freight and passenger transport services, supporting a range of fleet management operations and vehicle classes
Figure 1 illustrates the high-level architecture of the agent-based transport model in the HARMONY MS, focusing particularly on the integration of Aimsun Ride with external modules developed in the project. Travel schedules in the form of daily tours for synthetic individuals, shipments and parcels are produced by the disaggregate activity-based models for passenger and freight transport. The demand is further managed, disaggregated and simulated by the within-day simulation modules, i.e., the external controllers and the Aimsun Ride platform. The external passenger and freight controllers are responsible for managing individuals’ behavioural aspects (schedule re-evaluation, trip chain formulation) and service-fleet management decisions (fleet assignment, fleet relocation, travel recommendations for individuals) given the simulated network status and fleet performance – in simpler terms, the output of the controllers is the, dynamically generated, final passenger and fleet vehicle trips that need to be simulated (loaded into the supply network) by Aimsun Ride at different time stamps.

Aimsun Ride offers a gRPC-based (Remote Procedure Call framework) API which enables flexible server-client implementations with external Python modules that define and establish the (event- and time-based) communication patterns between external modules and Aimsun Ride – in this case, the integrator modules. The integrator modules may act either as a client, i.e., requesting dynamically (at simulation runtime) different types of information from the supply network (e.g., travel times), or as a server, i.e., Aimsun Ride is requesting/giving information from/to the integrator modules (e.g., trips, trip and vehicle status events). In addition to the above features, Aimsun Ride offers a path computation interface which may be used by externally integrated modules for optimal passenger and vehicle routing considering cost (travel time) minimization under different conditions (free flow, simulated and historical travel times) and different modalities.
A flexible configuration approach is provided by the Ride platform for creating simulation scenarios with concrete demand and supply settings. From the demand’s perspective, the default implementation requires transport demand, i.e., trips with, at least, information about origin, destination and departure time, to be know in advance by the Ride platform. During the simulation and once any trip is about to start, the simulator (client) generates a request for travel and calls the integrator modules (servers) for information with regards to the trip’s stages, i.e., the sequential trip legs to be performed with a specific mode type along with their origin and destination locations. However, Ride further offers the possibility to communicate trips and trip legs dynamically at simulation run-time without the need to know the demand in advance (e.g., for within-day demand re-evaluation scenarios) – in that case the integrator modules (clients) call Aimsun Ride (server) to simulate specific trips at different time intervals. From a supply and infrastructure standpoint, Aimsun Ride requires as input the supply network model (road and transit network infrastructure with travel times and timetables) along with information about service areas, service stations (e.g., for bike-sharing) and fleet specifications for each type of service (types, number and initial vehicle locations).
To enable the evaluation of system performance at post-simulation stages, Aimsun Ride generates, mainly, two output files (besides other network performance-related data):
1. An event log file with a complete list of events related to the simulated trips for different modes, including, among others, detailed information on travel states, agent positions, vehicle capacities and the simulated paths for each trip stage.
2. An optional recording file to visualize the simulation results within Aimsun Next’s graphical user interface.
The application of Aimsun Ride in the HARMONY project will enable the simulation-based evaluation of new passenger and freight transport concepts and their impact on congestion and air quality, including scenarios for 1) Autonomous Demand Responsive Transit (DRT) and MaaS services for the city of Oxford, UK, and 2) Microhubs for Urban Delivery services in the centre of Rotterdam, NL. The network scope and service areas that have been defined for these use-cases – supported and advised by the Oxfordshire and Rotterdam City Councils – are illustrated in Figures 2 and 3. Modelling these areas facilitates leveraging prior work, support utilization of the models in other projects and ensure its compatibility with other models available in Oxford and Rotterdam cities towards freight transport and passenger mobility planning.

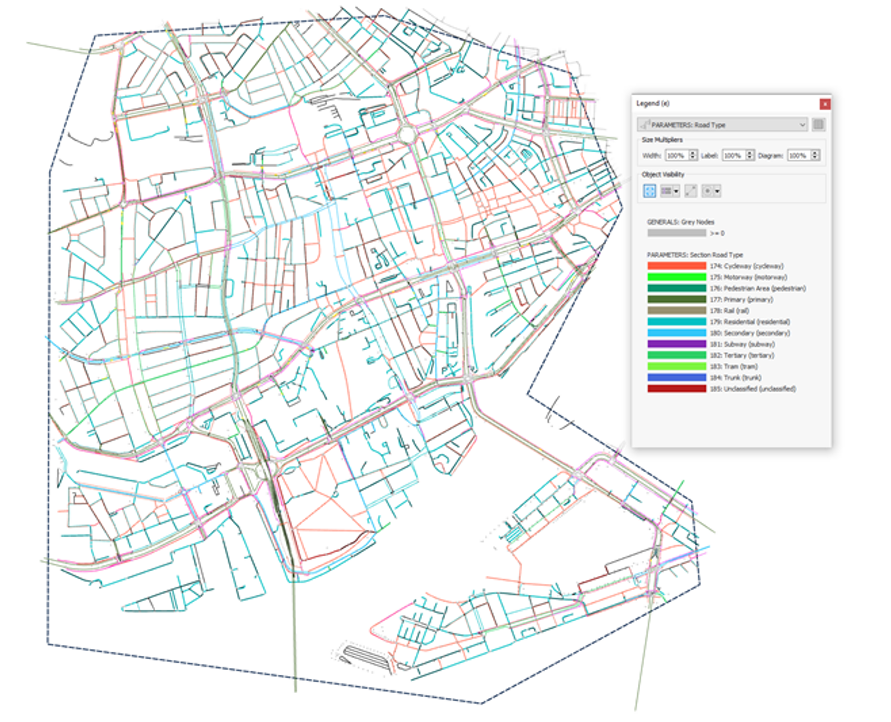
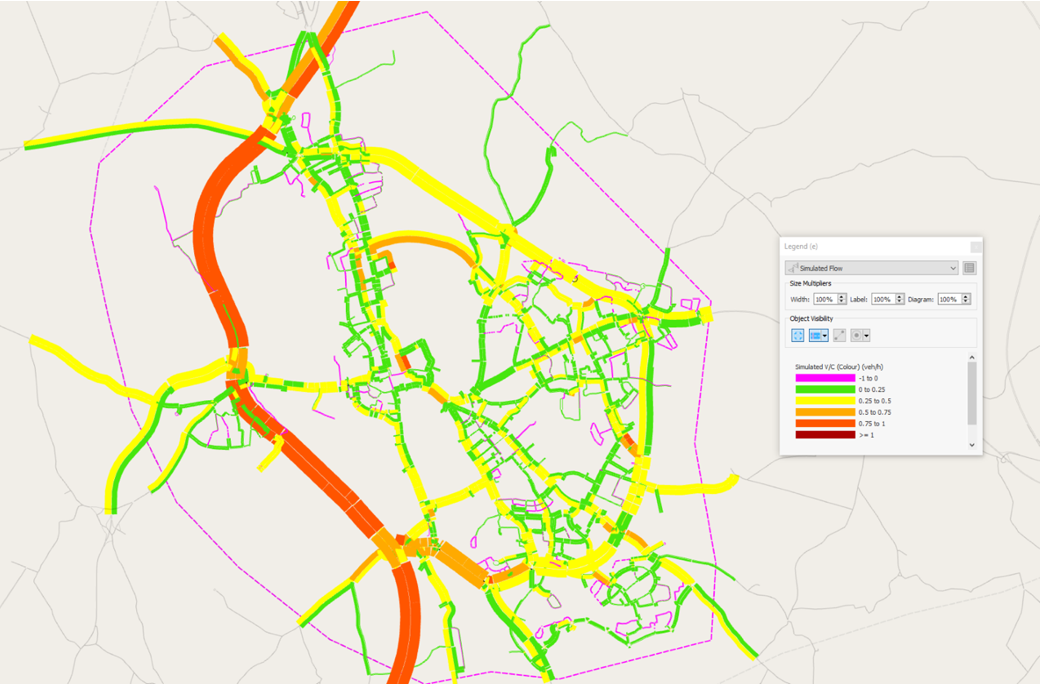
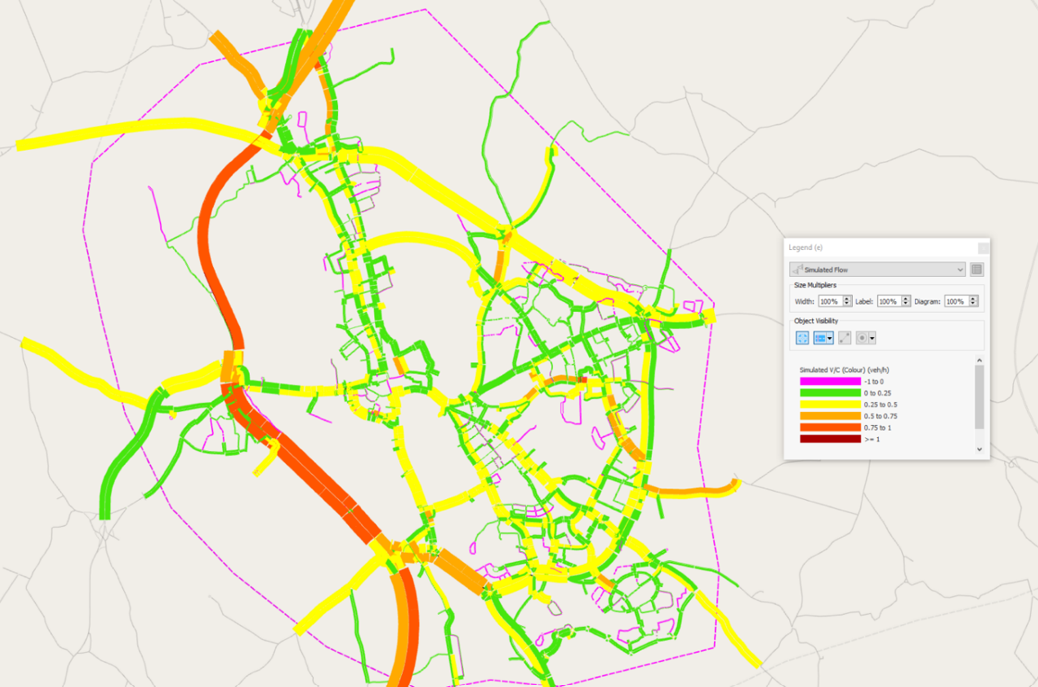
For the Oxford model, Aimsun has extended an existing Aimsun Next network model from the NEVFMA (Network Emissions / Vehicle Flow Management Adjustment) project with additional transit (bus and rail) and road infrastructure to enable microscopic operational simulations for the use-case at hand. The successful re-calibration of the network model relied on detector data given by the Oxfordshire City Council and indicative models results in terms of Volume over Capacity for AM and PM peak hours are illustrated in Figures 4 and 5.
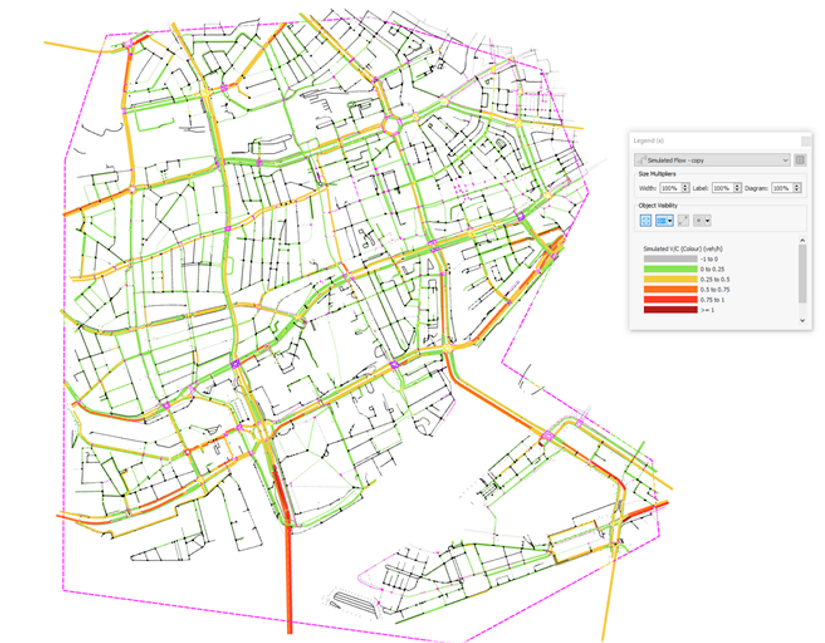
The Rotterdam Aimsun Next network model for the city centre relied on importing and extending accordingly a microscopic Paramics model, which has been made available by the city. Missing roads and cycling infrastructure have been added, while the demand for a 2 hour AM peak has been considered given the use-case at hand. Due to the lack of access in traffic counts and journey time data, the model’s calibration relied on Google Maps Traffic Layer to identify potential queuing situations. Consistent with the Google Traffic Layer results, Figures 6 and 7 illustrate Volume over Capacity and Delays in sections.

Simulation-based assessments via agent-based frameworks indeed have promising potential to extract valuable and more robust insights on demand and supply dynamics for demand management and sustainable operation policies. We are looking forward to bringing you more insights from the Aimsun Ride applications in Oxford and Rotterdam soon.
References
1. Pinjari, A.R. and Bhat, C.R., 2011. Activity-based travel demand analysis. In A handbook of transport Economics. Edward Elgar Publishing.
2. Bowman, J.L. and Ben-Akiva, M.E., 2001. Activity-based disaggregate travel demand model system with activity schedules. Transportation research part a: policy and practice, 35(1), pp.1-28.
3. De Jong, G., Vierth, I., Tavasszy, L. and Ben-Akiva, M., 2013. Recent developments in national and international freight transport models within Europe. Transportation, 40(2), pp.347-371.
